






即使有了先進的攝像頭和激光掃描儀,可以留意到周邊的所有車輛,但自動駕駛車輛在濃霧中駕駛仍然困難,存在變“瞎”的隱患。然而,這種狀況很快將得到改善,據《激光制造商情》了解,日前斯坦福大學的研究人員已經發明了一種新的成像系統,可以透過濃霧之類的障礙物,或者重建另一側的障礙物。
光可以穿過霧氣,但當光子穿過厚厚的濕氣云層時,它們會發生偏移與重新定向,并且不會從另一側看到可識別的物體,即使是一些人眼可以察覺和辨別的結構物體。此外,泡沫等其他材料也會以類似的方式散射光線——斯坦福大學的研究人員在開發新的成像設備時用泡沫作為濃霧的替代品。
他們在雜志《自然通訊》上發表的一篇論文《Three-dimensional imaging through scattering media based on confocal diffuse tomography》中分享了研究的細節:其工作方式類似于激光驅動的激光雷達掃描儀,自動駕駛汽車可以用這種掃描儀對周圍的世界進行三維成像。強大的激光在障礙物上來回掃描(他們在研究時用的是一塊一英寸厚的泡沫墻),而高度敏感的光子探測器可以記錄任何穿過泡沫的光子,光子擊中隱藏在另一邊的物體,然后再穿過障礙物反彈。
可以想象,與每秒發射的激光相比,很少有光子能夠返回探測器,但是研究人員開發了一種輔助硬件的定制算法,該算法不僅考慮到光子擊中探測器的時間,還考慮到它們對傳感器的影響——包括散射光子,它們的往返行程并不是一條直接的路徑。
盡管該算法所能提供的信息非常少,特別是與自動駕駛汽車中的LIDAR系統每秒處理的大量數據相比,它仍然能夠創建隱藏在障礙物后面的物體的三維結構,這是人眼在相同的情況下無法分辨的,所以它的精確性是驚人的。
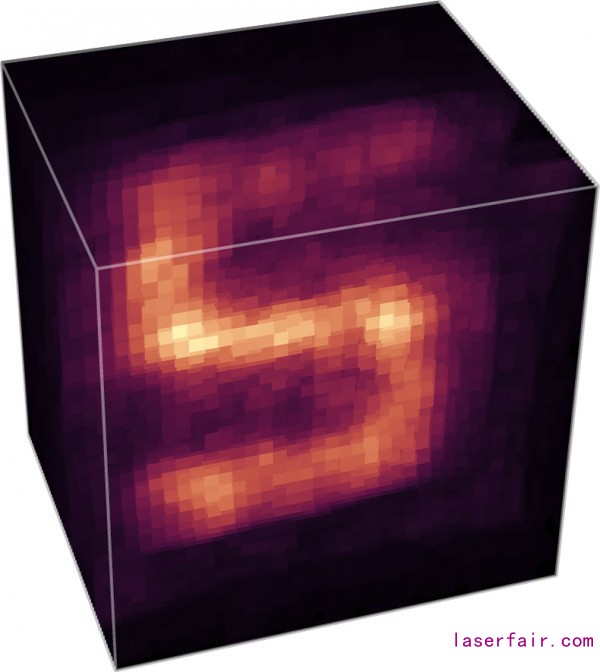
從1英寸厚的泡沫中可以看到反射字母“ S”的三維重建
但是,這項技術是否已準備好在上路的自動駕駛汽車中實施了嗎?不完全是。在測試過程中,雖然定制算法可以實時地處理數據并生成隱藏對象的三維結構,但掃描過程需要花費一分鐘到一小時不等,具體取決于隱藏對象的反射率。他們測試的裝置也只掃描了一小部分視野,而一輛自動駕駛汽車需要能夠視覺化,才能安全地在霧蒙蒙的環境中“航行”。
在霧天自動駕駛汽車能夠安全地行駛在路上,即使是標稱速度,也仍需要改進以使其成為實時可行的解決方案。不過,這項技術還有其它一些更直接的應用,包括詳細和準確的醫學成像,而無需醫生采取有創性探索手術。而且,在未來,航天探測器也可以攜帶成像設備,并依靠這種技術在一個遙遠星球的大氣層中透過云層和其他微粒,而不必實際降落在地面上。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

























 關注我們
關注我們

