




汽車氪獲悉,斯坦福大學的研發團隊開發出一款自動駕駛系統,可使自動駕駛車輛識別四周拐角處的物體,以便做出更早、更明智的操作。世界各地的研究人員正在努力開發機器學習技術,使汽車能夠識別現實環境中的物體并進行自動駕駛。但是目前這些車輛只能識別眼前的物體。
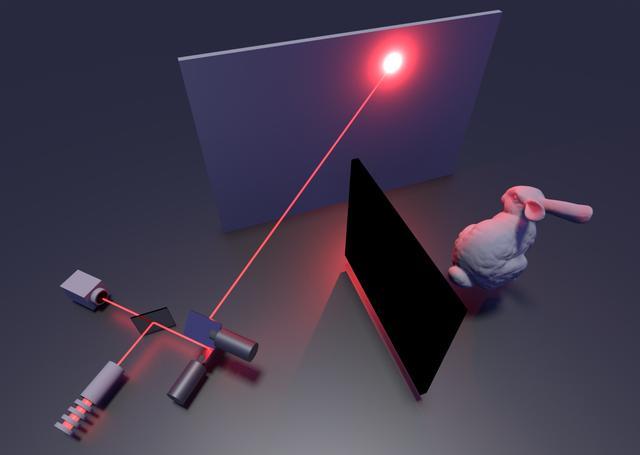
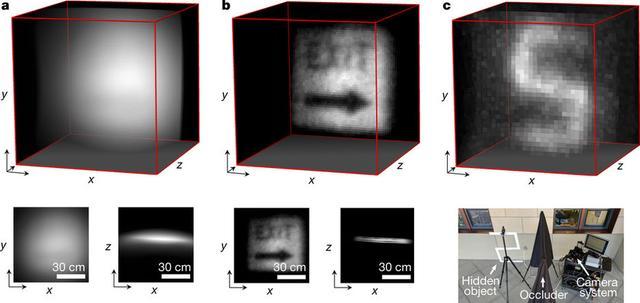
該技術基于超快速激光脈沖(super-fast laser pulses)而打造。目前所有的自動駕駛汽車視覺系統都使用兼容的激光雷達掃描儀來映射汽車周邊的環境。在實驗室測試中,該團隊能夠使用這些“皮秒”(picosecond)激光器掃描屏幕后面的物體,而無需直視。該技術是反射、光線傳感器和強大的新物體識別算法的產物。此外,研發人員使用單光子雪崩二極管(SPAD)來放大撞擊探測器的每個光子的信號。這些信號與墻的幾何圖形用于生成物體的3D視圖。此前,用相同技術進行的嘗試需要大量的計算能力和時間,但將傳感器和激光器放置在同一地點會顯著簡化算法,在電腦上處理數據只需幾秒鐘。
該團隊正在繼續深化研究該系統,希望通過環境光(ambient light)來提高現實環境中的精確性。另外,速度也是一個問題。雖然算法速度很快,但仍需至少幾分鐘的激光返回數據才能生成圖像。這對于高速行駛的汽車來說是不可行的。增加激光強度可能會是一種可行的方法。即使沒有這些優化,也可利用這項技術來檢測交通標志等反射物體。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

































 關注我們
關注我們

