





伴隨移動機器人(AGV)產業快速發展,激光導航移動機器人以其自主、靈活、高效、精準的優勢成為市場上最受歡迎的移動機器人產品,并在工業制造、醫療教育、商用服務等諸多領域廣泛應用。在移動互聯網及各大新媒體平臺的作用下,激光導航移動機器人產品逐漸走進大眾視野,成為人們生活中的屢見不鮮的“新物種”。但是對絕大多數的普通大眾而言,激光導航移動機器人是如何工作的,好似成為了新的世界未解之謎,讓大家百思不得其解。
今天,小編就帶大家來揭開這個“未解之謎”。
激光導航移動機器人要想完成作業任務,首先得解決這三個基本問題:“我在哪兒?”、“我要到哪里去?”、“我應該怎樣去?”。而要解決這三個問題就需要對移動機器人進行定位、建立地圖及路徑規劃。只有解決了這三個問題才能實現移動機器人的自主導航,完成一系列的運輸工作。

這時需要提及的是SLAM技術,SLAM意為即時定位與地圖構建。它解決的就是移動機器人在未知環境中如何進行自主導航的問題。激光導航移動機器人采用的是激光SLAM技術,工作原理是通過激光雷達對周圍環境進行信息采集,呈現出一系列分散的、具有準確角度和距離信息的點,被稱為點云。
密密麻麻的點云信息集合起來就會形成一張地圖,把這張地圖存儲在移動機器人中,當移動機器人在運行時通過實時的點云信息與存儲的地圖進行匹配與對比,計算激光雷達相對運動的距離和姿態的改變,也就完成了對機器人自身的定位。這時就解決了“我在哪兒?”的問題。
當完成地圖構建與機器人定位之后,解決“我要到哪里去”的問題就會變得相對簡單。在地圖中設定一個目標位置,并把目標位置告訴移動機器人,移動機器人便可以明確“我要到哪里去”。
相對較難的是“我應該怎樣去”的問題,因為在去到目標位置過程中,一方面是路徑規劃與路徑選擇,如何才能找到到達目標位置的最優路徑;一方面是去往目標位置過程中可能會遇到各種各樣的障礙,即自主導航及自主避障。而且,在移動機器人去往目標位置時可能會由于定位丟失或其它因素導致無法精確到達指定位置。這一系列問題的背后,都與移動機器人的算法緊密相連。掌握了最為核心的算法之后,“我應該怎樣去”的問題就會變得簡單起來。
從導航算法來看,由于激光導航移動機器人又分為激光反光板導航與激光自然輪廓導航兩種,它們的算法也不一樣。
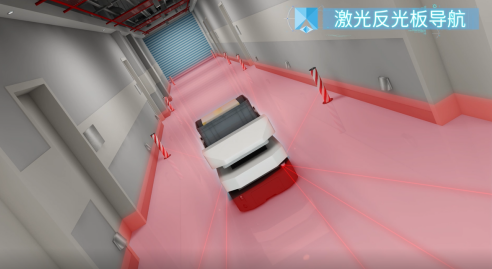
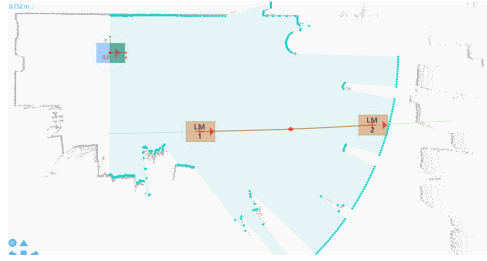
激光反光板導航通過激光雷達持續地發射激光脈沖,由旋轉機構將激光脈沖按一定角度間隔(角度分辨率)發射向掃描角度內的各個方向而形成一個以徑向坐標為基準的二維掃描面。激光雷達通過識別掃描范圍內的物體表面反射率,來識別激光反光板的位置信息,再通過最少三個反光板的位置計算出激光雷達所在的AGV的位置和姿態信息。

而激光自然輪廓導航則是通過激光掃描儀對自然環境(如墻壁、柱子或其它固定物體)進行測量、學習,結合自身所攜帶的內部傳感器(編碼器、IMU等)和外部傳感器(激光傳感器)來對自身進行定位。它的算法會融合激光、編碼器、陀螺儀等多種傳感器的數據來進行計算。
而在解決了“我在哪兒?”、“我要到哪里去?”、“我應該怎樣去?”這三個基本問題之后,相信大家對移動機器人是如何工作的便有了答案。
最后值得一提的是,在實際應用場景中,假如網絡環境狀況不佳,地面不平整、有坑洞,移動機器人行徑路線有行人等不可預見的障礙,也會對移動機器人安全順利的完成工作產生一定的阻礙。這時便需要多種方式來確保移動機器人安全運行。
作為一站式移動機器人方案專家,面對各種復雜場景,仙知機器人都有不同的解決方案。如移動機器人在多個AP的現場環境中運行,仙知解決方案可通過選配Wi-Fi漫游功能來確保網絡穩定性;如地面有坑洞,可選配3D相機進行識別檢測,根據配置選擇停障或繞行;如車間有流動的工人,可使用雙激光移動機器人、碰撞條等多種防范措施確保機器人安全運行。
今天,小編就帶大家來揭開這個“未解之謎”。
激光導航移動機器人要想完成作業任務,首先得解決這三個基本問題:“我在哪兒?”、“我要到哪里去?”、“我應該怎樣去?”。而要解決這三個問題就需要對移動機器人進行定位、建立地圖及路徑規劃。只有解決了這三個問題才能實現移動機器人的自主導航,完成一系列的運輸工作。
這時需要提及的是SLAM技術,SLAM意為即時定位與地圖構建。它解決的就是移動機器人在未知環境中如何進行自主導航的問題。激光導航移動機器人采用的是激光SLAM技術,工作原理是通過激光雷達對周圍環境進行信息采集,呈現出一系列分散的、具有準確角度和距離信息的點,被稱為點云。
密密麻麻的點云信息集合起來就會形成一張地圖,把這張地圖存儲在移動機器人中,當移動機器人在運行時通過實時的點云信息與存儲的地圖進行匹配與對比,計算激光雷達相對運動的距離和姿態的改變,也就完成了對機器人自身的定位。這時就解決了“我在哪兒?”的問題。
當完成地圖構建與機器人定位之后,解決“我要到哪里去”的問題就會變得相對簡單。在地圖中設定一個目標位置,并把目標位置告訴移動機器人,移動機器人便可以明確“我要到哪里去”。
相對較難的是“我應該怎樣去”的問題,因為在去到目標位置過程中,一方面是路徑規劃與路徑選擇,如何才能找到到達目標位置的最優路徑;一方面是去往目標位置過程中可能會遇到各種各樣的障礙,即自主導航及自主避障。而且,在移動機器人去往目標位置時可能會由于定位丟失或其它因素導致無法精確到達指定位置。這一系列問題的背后,都與移動機器人的算法緊密相連。掌握了最為核心的算法之后,“我應該怎樣去”的問題就會變得簡單起來。
從導航算法來看,由于激光導航移動機器人又分為激光反光板導航與激光自然輪廓導航兩種,它們的算法也不一樣。
激光反光板導航通過激光雷達持續地發射激光脈沖,由旋轉機構將激光脈沖按一定角度間隔(角度分辨率)發射向掃描角度內的各個方向而形成一個以徑向坐標為基準的二維掃描面。激光雷達通過識別掃描范圍內的物體表面反射率,來識別激光反光板的位置信息,再通過最少三個反光板的位置計算出激光雷達所在的AGV的位置和姿態信息。
而激光自然輪廓導航則是通過激光掃描儀對自然環境(如墻壁、柱子或其它固定物體)進行測量、學習,結合自身所攜帶的內部傳感器(編碼器、IMU等)和外部傳感器(激光傳感器)來對自身進行定位。它的算法會融合激光、編碼器、陀螺儀等多種傳感器的數據來進行計算。
而在解決了“我在哪兒?”、“我要到哪里去?”、“我應該怎樣去?”這三個基本問題之后,相信大家對移動機器人是如何工作的便有了答案。
最后值得一提的是,在實際應用場景中,假如網絡環境狀況不佳,地面不平整、有坑洞,移動機器人行徑路線有行人等不可預見的障礙,也會對移動機器人安全順利的完成工作產生一定的阻礙。這時便需要多種方式來確保移動機器人安全運行。
作為一站式移動機器人方案專家,面對各種復雜場景,仙知機器人都有不同的解決方案。如移動機器人在多個AP的現場環境中運行,仙知解決方案可通過選配Wi-Fi漫游功能來確保網絡穩定性;如地面有坑洞,可選配3D相機進行識別檢測,根據配置選擇停障或繞行;如車間有流動的工人,可使用雙激光移動機器人、碰撞條等多種防范措施確保機器人安全運行。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

























 關注我們
關注我們

