






一、諸論
(一)研究背景
伴隨著人工智能的高速發展,為解決交通堵塞、通行效率低的問題,自動駕駛汽車取得了前所未有的發展。
汽車作為重要的運載工具,通過車載傳感器(車規級傳感器設備),可視設備,控制器,執行器等電子設備,形成一種可以在任意地點,任意時刻,能夠接入任意信息的模式,為汽車提供智能環境的支持,達到提高車輛安全性的目的。目標識別感知及控制系統目前已經成為汽車智能化的亮點和賣點。
2015年,工信部發布的《中國制造2025》明確提出,到2025年,我國將掌握自動駕駛的總體技術以及各項關鍵技術,要建立起比較完善的智能網聯汽車的自主研發體系,生產配套體系以及產業群,要基本完成汽車產業的轉型升級。所以在政策和市場的共同作用下,我國的智能汽車技術發展迅猛,智能汽車領域相關系統以及應用軟件的開發已經初步成形。
本論文以溫州大學甌江學院智能車綜合開發控制系統臺架為平臺,以LS-C161A型16線激光雷達為研究對象,充分運用Apollo、51Simone綜合仿真系統,以傳感器技術、多傳感器融合為基礎,解決了傳統激光雷達測試成本高、仿真效果差、訓練集單一的缺點,對基于激光雷達的目標識別感知控制算法提出了改進措施;并對基于低速無人駕駛車輛上的目標識別進行了深入的研究;最后,基于多傳感器融合的確定性目標關聯算法,實現了特殊道路場景下不確定數目的多個車輛目標的跟蹤,為汽車的主動防撞及自動駕駛奠定堅實的基礎。
(二)激光雷達的定義和關鍵技術
激光雷達又稱光學雷達(LiDAR,Light Detection And Ranging),是一種先進的光學遙感技術。激光雷達可以用于測量物體距離和表面形狀,其測量精度可達厘米級。
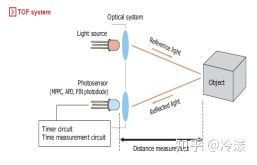
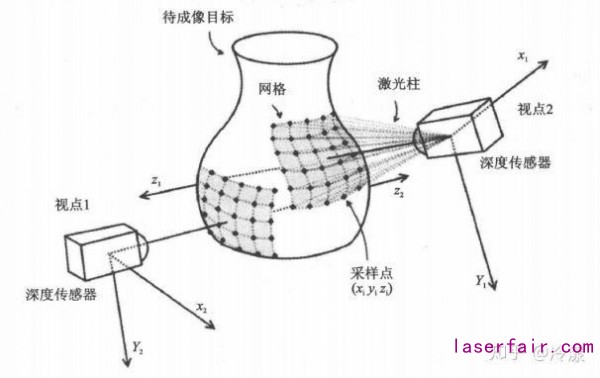
圖1-1 激光雷達工作原理
激光雷達,是以發射激光束探測目標的位置、速度等特征量的綜合雷達系統。其工作原理是向目標發射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,作適當處理后,就可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態、甚至形狀等參數,從而對目標車輛等目標進行探測、跟蹤和識別。
本論文研究的LS-161A型激光雷達采用混合固態激光雷達方式,集合了 16 個激光收發組件,測量距離高達 150 米,測量精度+/- 2cm 以內,出點數高達 300,000 點/秒,水平測角 360°,垂直測角 -15°~15°。 LS-161A通過 16 個激光發射組件快速旋轉的同時發射高頻率激光束對外界環境進 行持續性的掃描,經過測距算法提供三維空間點云數據及物體反射率,可以讓機器看到周圍的世界,為定位、導航、避障等提供有力的保障。
二、基于激光雷達的目標識別
(一)引言
激光雷達是一種主動探測傳感器,其受環境干擾小,精度高、速度快的特點,廣泛適用于移動機器人、AGV等的目標檢測和識別方面。
關于激光雷達的目標檢測,主要集中在行人和障礙物方面,針對以上兩種目標,重點在于如何研究高效的控制模型。對于自動駕駛汽車來說,從高清圖像中檢測出特征物體尤為重要,例如不易被發現的紅綠燈、行人等。
目標識別的難點在于以下幾個方面
l 無法準確無誤的分割目標物體,特別是目標特征不顯著的物體;
l 不同的物體在不同角度的探測結果不同;
l 環境對目標物體信息的干擾;
(二)基于激光雷達的環境感知
自動駕駛的四大核心技術包括環境感知、精度定位、路徑規劃和線控執行四大部分,環境感知是實現自動駕駛的先決和必要條件,越來越多的研究表明,僅僅依靠視覺的環境感知很難達到自動駕駛要求的。
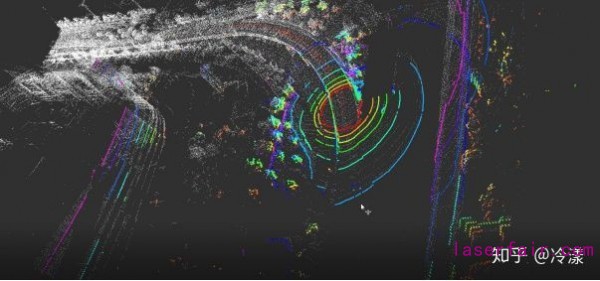
環境感知主要包括路面、靜態物體和動態物體三個方向。自動駕駛汽車對于動態物體的感知,不僅要檢測物體,還要對其軌跡進行追蹤,從而預計車輛的行駛軌跡。對于市區道路尤其中國的復雜市區必不可少。
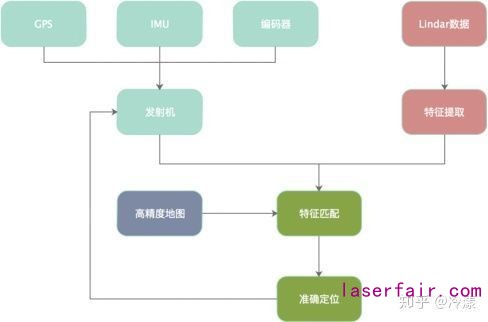
圖2-1 激光雷達環境感知
(三)激光雷達目標數據預處理
通常激光雷達在工作時,每一束激光對應一個目標物體的三維立體坐標(靜態位姿),但實際上目標物體是在不斷運動和變化的,在運動和變化的過程中會發生物體的形狀畸形變化,為了保證目標數據的穩定和可靠,我們要去除物體畸形變化。
由激光雷達原始產生的目標數據,可以獲取每一束激光打在障礙物上的激光點距的絕對距離值和角度值。轉換為目標距離值和角度值,去畸變之后,轉化為新的數據重新發布。
首先我們要先假設一個自動駕駛車輛模型,使得模型車輛做勻速直線運動,然后將每一個時間的數據存儲在隊列里面。
以下是數據預處理的操作過程和源代碼:
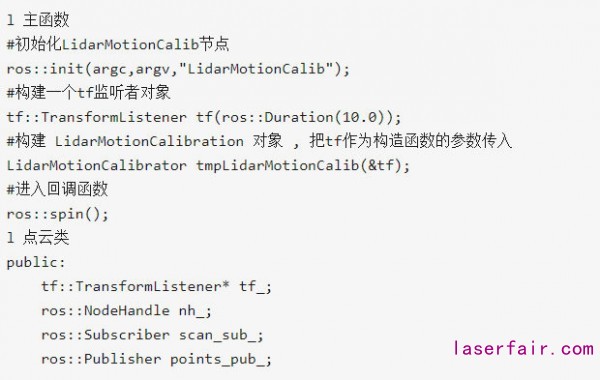
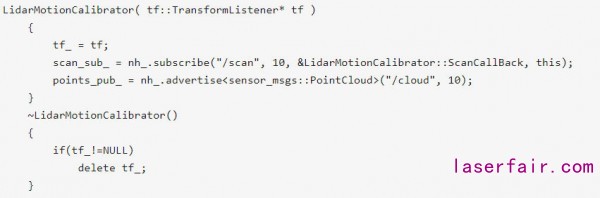
l 點云類的構造函數
(四)激光雷達數據可視化
Pcl Visualizer是cloud Viewer的后端可視化工具,但它在單線程中運行,若要使用PCLVisualizer類必須使用調用函數,這樣可以避免可視化的并發問題。
以下是實現數據可視化的代碼:

下面函數作為回調函數,在主函數中注冊后只執行一次,函數具體實現對可視
化對象背景顏色設置等。
編譯并運行程序,得到點云數據圖。
(五)激光雷達濾波處理
PCL中總結了幾種需要進行點云濾波處理的情況,這幾種情況分別如下:
(1) 點云數據密度不規則需要平滑。
(2) 因為遮擋等問題造成離群點需要去除。
(3) 大量數據需要進行下采樣(Downsample)。
(4) 噪聲數據需要去除。
對應的方法如下:
(1) 按具體給定的規則限制過濾去除點。
(2) 通過常用濾波算法修改點的部分屬性。
(3) 對數據進行下采樣。
雙邊濾波算法是通過取鄰近采樣點的加權平均來修正當前采樣點的位置,從而達到濾波效果。同時也會有選擇剔除部分與當前采樣點“差異”太大的相鄰采樣點,從而達到保持原特征的目的。
pcl.filters庫提供了對噪聲點和離群點去除的具體實現# filters模塊利用32個類與5個函數實現了利用filters對點云數據進行不同的濾波以達到除去不需要的點的目的,其依賴于 pci:: common,pci::sample.consensus、pci::search、pci::kdtree、pci: :octree 模塊。
(六)激光雷達點云構建深度圖像
深度圖像(Depth Images)也被稱為距離影像(Range Images),是指將從圖像采集器到場景中各點的距離(深度)值作為像素值的圖像,它直接反映了景物可見表面的幾何形狀,利用它可以很方便的解決3D目標描述中的許多問題。深度圖像經過坐標轉換可以計算為點云數據,有規則及必要信息的點云數據也可以反算為深度圖像數據。
因為記錄距離信息的方式的差異性,所以在英文文獻中對深度圖像的表達呈現出很強的多樣性。使用較多的表達是:range image。Arman和Aggarwal在對三維目標識別技術進行綜述時指出depth map、dense~depth map、depth image、rangepicture^3D imagesurface height map都是等價的表示術語。除此以外的常見表達還有:dense-range image、depth aspect image、2. 5D image、3D data、xyz mapssur-face profiles 等。
從數學模型上看,深度圖像可以看做是標量函數j 在集合K上的離散采樣,得到圖像,其中旳Er為二維網格(矩陣)的索引eR,/={1 ,盤},如下圖所示:
(七)激光雷達點云關鍵點
NARF(Normal Aligned Radial Feature)關鍵點是為了從深度圖像中識別物體而提出的,關鍵點探測的重要一步是減少特征提取時的搜索空間,把重點放在重要的結構上,對NARF關鍵點提取過程有以下要求:
①提取的過程必須考慮邊緣以及物體表面變化信息在內;
②關鍵點的位置必須穩定的可以被重復探測,即使換了不同的視角;
③關鍵點所在的位置必須有穩定的支持區域,可以計算描述子和進行唯一的估計法向量。為了滿足上述要求,提出以下探測步驟來進行關鍵點提取:
(1) 遍歷每個深度圖像點,通過尋找在近鄰區域有深度突變的位置進行邊緣檢測。
(2) 遍歷每個深度圖像點,根據近鄰區域的表面變化決定一測度表面變化的系數,以及變化的主方向。
(3) 根據第二步找到的主方向計算興趣值,表征該方向與其他方向的不同,以及該處表面的變化情況,即該點有多穩定。
(4) 對興趣值進行平滑過濾。
(5) 進行無最大值壓縮找到最終的關鍵點,即為NARF關鍵點。
(八)激光雷達特征提取
3D點云特征描述與提取是點云信息處理中的最基礎也是最關鍵的一部分,點云的識別、分割、重采樣、配準、曲面重建等處理大部分算法,都嚴重依賴特征描述與提取的結果。從尺度上來分,一般分為局部特征描述和全局特征描述,例如局部的法線、等幾何形狀特征的描述,全局的拓撲特征描述,都屬于3D點云特征描述與提取范疇。在PCL中,目前已有很多基本的特征描述子與提取算法,相信在社區的快速增長下會集成和添加更多特征描述子和提取算法。
利用描述子建立曲面間的對應點在3D物體識別領域有廣泛應用。采用一個向量描述曲面上指定點及其鄰域的形狀特征,通過匹配向量的值來建立不同曲面間點的對應關系,此冋量即為指定點的描述子,經典描述子3D形狀內容描述子構造簡單,辨別力強,且對噪聲不敏感。其構造方法為:在以指定點p為中心的球形支撐域內,沿徑向、方向角和俯仰角3個坐標方向劃分成網格,統計落入網格內的點數,構造向量Vo V的每個元素與支撐域內的一個網格對應,元素的值為對應網格中的點數,向量V即為點P的描述子。
三、總結
本論文通過對激光點云數據的綜合處理,得出了一種低速無人駕駛汽車適用的目標識別感知控制算法。對低速自動駕駛汽車研究提供了理論依據,也為低速自動駕駛Demo研究提供了數據支持。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

























 關注我們
關注我們

