




據外媒報道,加州大學圣地亞哥分校(University of California San Diego)的電氣工程師開發了一種方法提高現有雷達傳感器的成像能力,可以使其準確預測場景中物體的形狀和大小。新系統在夜間和大霧天氣測試時表現良好。
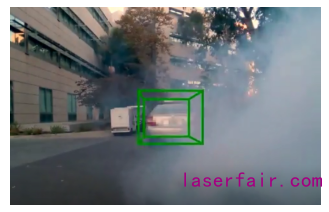
(圖片來源:加州大學圣地亞哥分校)
惡劣的天氣會給自動駕駛汽車帶來挑戰。自動駕駛汽車依靠像激光雷達和雷達等技術來觀察周圍環境,并進行導航,但每種技術都有其缺點。在晴朗的天氣條件下,激光雷達可以繪制高分辨率3D圖像,但在霧、塵、雨或雪等環境中卻無法看清周圍環境。而雷達雖然不受天氣影響,但卻只能捕捉部分道路圖像。
加州大學圣地亞哥分校教授Dinesh Bharadia解釋道,“這是一種類似激光雷達的雷達,能以較低的成本,使自動駕駛汽車在惡劣天氣條件下也能感知周圍環境。我們的技術還可以實現激光雷達和雷達的融合,無需使用昂貴的激光雷達。”
該系統由裝置在發動機罩上的兩個雷達傳感器組成,其平均間距為普通汽車的寬度(1.5米)。相較于單一的雷達傳感器,以此種方式布置兩個雷達傳感器能使系統看到更多的空間和細節。在晴朗的晝夜進行測試駕駛時,在確定移動車輛的輪廓方面,該系統的性能與激光雷達傳感器相當。而且在模擬大霧天氣的試驗中,其性能也沒有變化。該團隊使用煙霧器,使另一輛汽車隱藏起來,該系統仍能精確地預測該車輛的3D幾何形狀,而激光雷達傳感器卻沒有通過測試。
雷達成像質量較差的原因在于,當無線電波從物體上反射時,只有一小部分信號會反射回傳感器,因此,車輛、行人和其他物體以稀疏的點集形式出現。加州大學圣地亞哥分校計算機科學和工程博士Kshitiz Bansal表示,“這就是使用單一雷達進行成像所面臨的問題。由于單個雷達只接收到幾個點來代表場景,因此感知能力較差,就需要采用多雷達裝置,通過增加反射點的數量來提升感知能力。”研究小組發現,將兩個雷達傳感器間隔1.5米裝置在汽車引擎蓋上是最優方案。Bansal稱,“以此種方式安裝兩個雷達可以創建高分辨率區域,從而提高物體檢測性能。”
此外,該系統還克服了雷達的另一個缺點:噪點。在雷達圖像中經常會出現不屬于任何物體的隨機點,傳感器會接收到這些回波信號,即不是直接來自被探測物體的無線電波反射信號。Bharadia指出,更多的雷達意味著更多的噪點。因此,該團隊開發了一種新算法,可以將來自兩個不同雷達傳感器的信息融合在一起,生成無噪點的新圖像。
同時,該團隊還構建了一個數據集,融合了來自兩個雷達的數據。Bharadia表示,“目前還沒有包含此類數據的公開數據集,這些數據來自多個雷達的重疊視場。我們收集自己的數據,建立自己的數據集,用于訓練算法和測試。”
該數據集由54000幀在白天和夜晚拍攝到的雷達圖像組成,包含實時交通和模擬的霧天駕駛場景。未來,研究人員將在雨天收集更多的數據,為此,該團隊需要為其硬件打造更好的防護罩。目前,該團隊正與豐田公司合作,將新的雷達技術與攝像頭結合起來。研究人員表示,此種技術有可能取代激光雷達。Bharadia表示,“僅依靠雷達,我們無法感知車輛顏色或型號,而這些特征對于提高自動駕駛汽車的感知能力也很重要。”
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

































 關注我們
關注我們

