






近日,國家重點研發計劃“重大科學基礎設施FAST運行維護作業機器人系統”項目通過科技部驗收。中國科學院自動化研究所景奉水課題組與中國科學院國家天文臺、貴州射電天文臺聯合研制的反射面激光靶標維護機器人作為其中一項標志性成果,可高效完成激光靶標的清潔、拆卸和換裝等任務,成功實現了對FAST反射面上激光靶標的全自動維護,為“中國天眼”提供運維保障。
五百米口徑球面射電望遠鏡(FAST)是世界上單體口徑最大、觀測精度最高的射電望遠鏡。在FAST的反射面上分布了2225個激光靶標,是其控制系統的重要組成部分,宛如反射面的“眼睛”,需要定期維護和更換。然而,反射面由厚度僅為1mm的鋁板構成,難以承受一個正常成年人的重量,目前主要依賴“微重力蜘蛛人”進行人工維護,存在維護效率低、安全性差、難以維護大坡度環境下的靶標等缺點。
針對FAST表面復雜的維護環境,項目組突破了大坡度特殊表面全向移動、復雜環境下三維測量、非結構化環境下異形螺栓自主旋擰等技術難題,完成了靶標維護機器人的研制。機器人系統整體上由靶標維護執行系統、全向運動平臺和導航系統組成,能夠進行反射面全向行走、靶標位姿的精確三維測量、舊靶標拆卸抓取、新靶標裝配擰緊等操作,可自主完成靶標的更換和清洗任務,開展全自動的靶標維護工作。
為確保FAST現場維護的安全性,項目組成員在高坡度反射面模擬環境下對該機器人進行了長時間的調試實驗,驗證了56度極限坡度條件下機器人的移動性能和靶標維護性能。在經過貴州射電天文臺現場實際環境的適應性調試后,該機器人已成功應用于FAST反射面激光靶標的更換維護,將有力解決此前存在的高危作業風險隱患、人工維護效率低下、氣候條件制約觀測等問題,極大提升FAST維護作業的效率和安全性。

(左)FAST反射面上的微重力蜘蛛人 (右)FAST反射面上的激光靶標

FAST激光靶標維護機器人
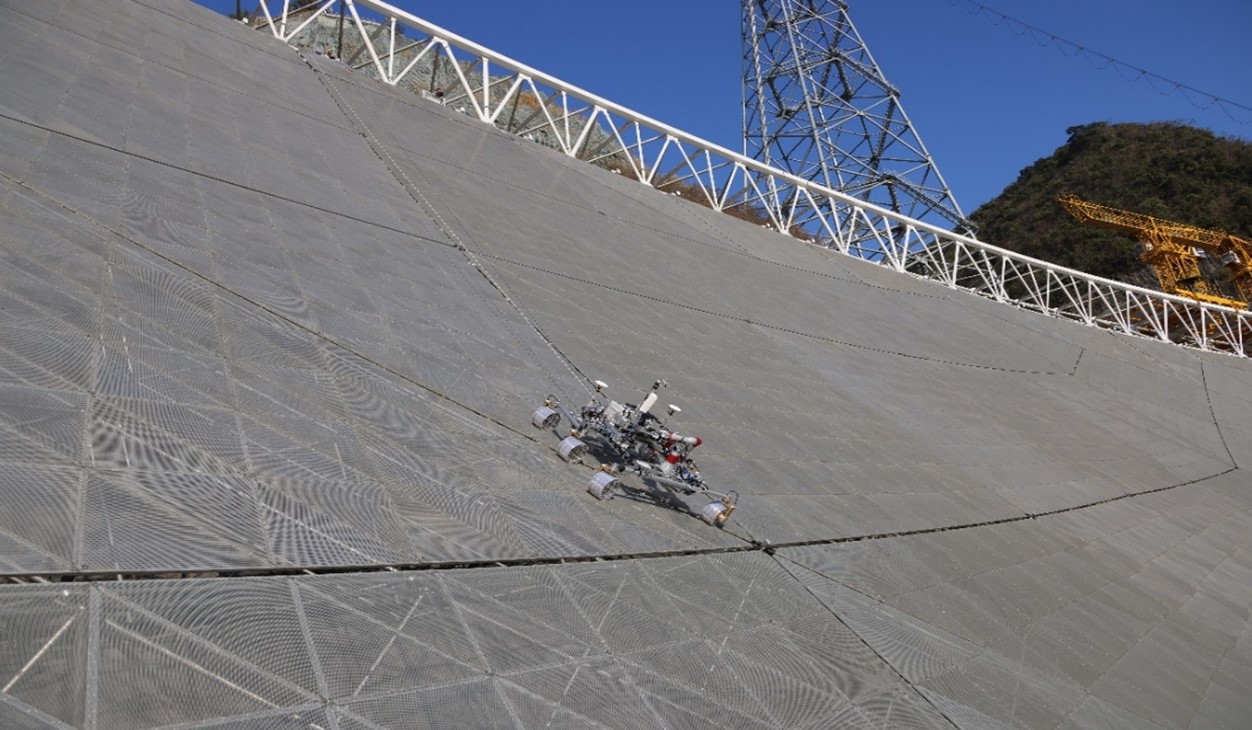
機器人在FAST反射面上進行測試

團隊成員合照,左起:中國科學院國家天文臺蔣志乾高級工程師、朱麗春研究員,中國科學院自動化所景奉水研究員、博士生陶銳、博士生付一宸,貴州射電天文臺宋本寧
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

























 關注我們
關注我們

