






激光雷達作為現代精確測距和感知技術的關鍵組成部分,在近幾年里取得了令人矚目的發展。目前國內車規級激光雷達標準逐步趨于完善,伴隨半固態式、固態式等技術不斷革新,未來作為自動駕駛核心配置的發展潛力巨大。除此之外激光雷達也在機器人技術、智能制造等領域廣泛應用,促使激光雷達市場不斷增長。
激光雷達技術路線多樣,當前仍處于多技術路線并行階段。技術路線有四個主要的維度:測距原理、光源、探測器、光束操縱。激光雷達主要包括激光發射、掃描系統、激光接收和信息處理四大系統,四個系統相輔相成。根據這四個系統的不同特征,可以從四個不同維度來闡述激光雷達技術路線。其中光源和探測器即激光雷達的發射端與接收端,光束操縱即激光雷達的掃描方式,測距則為信息處理提供距離信息。根據四個主要的維度可以將激光雷達進行分類,每個不同分類方式又可進一步細分為不同的技術路線,不同路線之間存在較大差異。
1、測距方法
(1)按測距方法分類
根據測距方法分類,激光雷達可分為4種類型。激光雷達根據測距原理主要有四類:飛行時間法(ToF)、調頻連續波(FMCW)、三角測距法和相位法。最主要的兩種測量方法是ToF和FMCW。ToF測量原理是通過記錄短脈沖發射到接收到反射光之間的時間來測量距離,并在測量過程中通過反射光的角度來測量物體的位置。FMCW的測量原理是將發射激光的光頻進行線性調制,使回波信號與參考光進行相干拍頻得到頻率差來間接獲得飛行時間反推目標物距離,優點是抗干擾強、可直接測量速度。
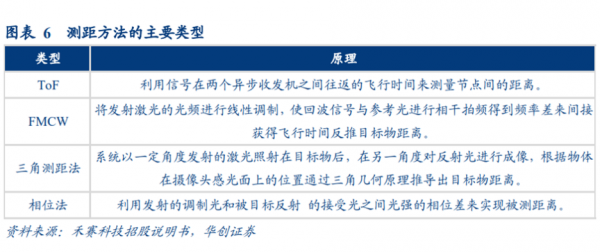
(2)ToF測距方法當前為主流,FMCW具備良好前景
激光雷達測距方法中ToF與FMCW能夠實現室外陽光下較遠的測程(100~250m),是車載激光雷達的優選方案。
ToF是目前車載中長距激光雷達市場的主流方案,有非常高的激光發射頻率,具備高精度探測優勢,但ToF激光雷達最大激光功率受到限制,探測距離存在瓶頸,在白天會受到陽光干擾,在接收信號過程中產生噪音。而FMCW激光雷達具有可直接測量速度信息以及抗干擾、遠程性高的優勢,視距可以擴展至1,000米或者2,000米,但FMCW的激光雷達對激光器的要求非常高,同時信號解算又相當復雜,設計和制造使成本較高,因此技術上仍具有挑戰。未來隨著FMCW激光雷達整機和上游產業鏈的成熟,其占比有望獲得提升,預計FMCW激光雷達在2024年左右可以實現量產,成為和ToF并存的主要測距方式。

2、發射單元
(1)按激光波長將激光器分類
激光雷達的激光器可以分為以光纖激光器為代表的1550nm(遠波紅外,SWIR)激光器和以半導體激光器為代表的905nm(近紅外,NIR)激光器。其中,近紅外激光器依據發光原理的不同,又可分為邊發射激光器(EEL),垂直腔面發射激光器(VCSEL)和固體激光器。
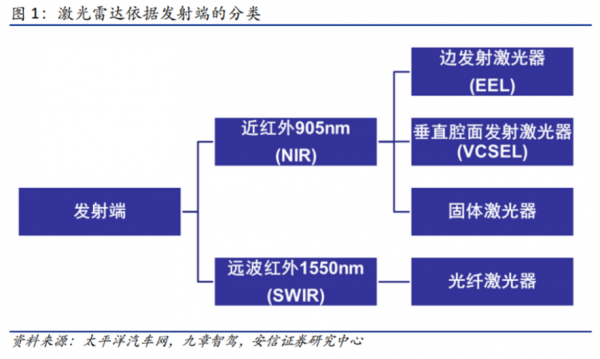
光纖激光器與半導體激光器不同的地方主要在諧振腔。半導體激光器使用不同介質的分界面作為反射面,從而形成諧振腔。而光纖激光器直接使用光纖作為諧振腔。大氣穿透能力強,人眼安全性高,峰值功率可達上百甚至上千瓦,單色性好是激光光源的顯著特點,但是激光雷達在光源及探測器成本、體積、溫度穩定性以及供應鏈成熟度上還有明顯的不足。其更新頻率約在10赫茲,但是汽車高速行駛狀態至少要達到25赫茲,影響成像的實時性。
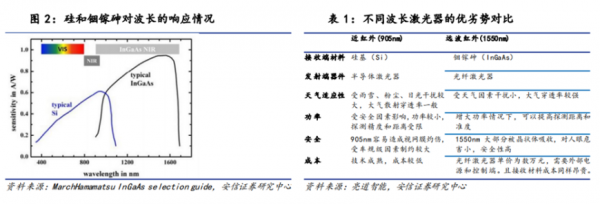
(2)905nm器件較為成熟,1550nm是未來發展方向
傳統的905nm可以使用廉價的硅基CMOS作為接收端,其光噪聲和控制信號比較平穩,但是905nm測距受限在150米以內。由于出于安全角度要選用一級的能量(只能實現150m),近紅外波段僅適用于乘用車。商用車至少需要300米探測距離,就需要用到1550nm的光源。遠波紅外激光在空氣中的衰減性更弱,進入人的視網膜之后無法聚焦不會傷害眼睛晶體,可以在保證安全基礎上人為增加能量,增大探測距離。但是,遠波紅外光源必須使用較為昂貴的銦鎵砷(InGaAs)作為接收端,其具有生產工藝難,激光器價格高的缺陷。此外探測距離遠意味著功率大,這也對芯片散熱能力以及封裝提出了更高要求。
(3)對905nm工藝而言,EEL制作工藝復雜,VCSEL未來有望迎來快速發展
目前,成熟的近紅外工藝(905nm等)主要的激光發射器為邊發射激光器(EEL)和垂直腔面發射激光器(VCSEL)。據禾賽科技招股書,EEL作為探測光源具有高發光功率密度的優勢,但因為其發光面位于半導體晶圓的側面,使用過程中需要進行切割、翻轉、鍍膜、再切割的復雜工藝步驟,而且每顆激光器極大地依賴產線工人的手工裝調技術,生產成本高且一致性難以保障。而VCSEL因為發光面與半導體晶圓平行,其所形成的激光器陣列易于與平面化的電路芯片鍵合,無需再進行每個激光器的單獨裝調,且易于和面上工藝的硅材料微型透鏡進行整合,能有效提升光束質量。近年來國內外多家VCSEL激光器公司紛紛開發了多結VCSEL激光器,使得VCSEL光功率密度得到有效提升,VCSEL得以被運用在長距激光雷達領域。從生產成本和產品性能可靠性看,VCSEL未來將有望逐漸取代EEL。

3、接收單元
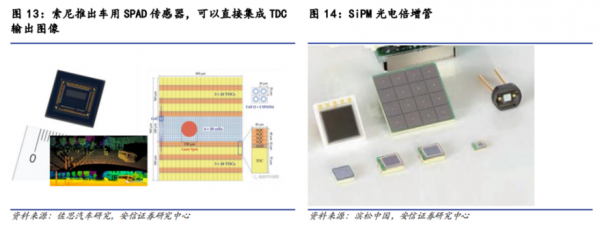
激光雷達里的探測器即光電探測器可分為PINPD(PIN光電二極管)、APD(雪崩式光電二極管)、SPAD(單光子雪崩二極管)、SiPM(硅光電倍增管)四類。APD為當前主流。

SPAD相對雪崩二極管(PAD),靈敏度和工作效率更高。APD和SPAD工作機制的差異,主要在于不同電場下的載流子行為不同。APD工作在擊穿電壓附近(<擊穿電壓),表現出有限的增益。SPAD工作在擊穿電壓以上,表現出無限的增益(理論增益為∞),可以實現單光子觸發。因此,SPAD具有比APD更高的靈敏度。激光強度更高的EEL可以配合APD使用,而VCSEL可以搭配更靈敏的SPAD。基于SPAD可以檢測到單個光子,因此可以做成光子計數器,集成了TDC的SPAD不需要再進行點云處理,直接可以輸出深度圖像。
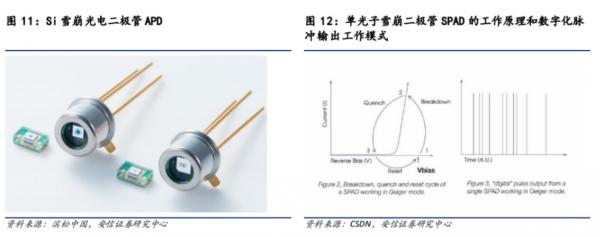
APD相較SPAD受噪聲影響較小,性能更加穩定。1)如果背景光噪聲較強,SPAD會由于頻繁的誤觸發而處于一種“疲勞”的狀態,點云噪點會明顯增多;2)高溫會進一步影響SPAD的噪聲水平,在原有的暗計數、后脈沖效應、串擾等不利因素的基礎上,加劇性能的惡化。因此,在夜晚等沒有太強背景光的場景下,高性能SPAD的表現優于APD,但在太陽光強烈、極端溫度的環境下,現有SPAD的綜合表現卻是顯著低于APD的。
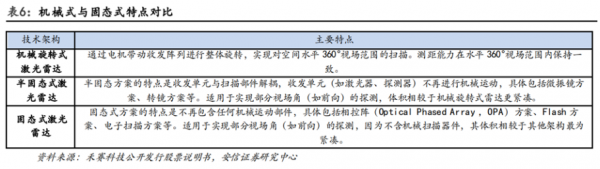
集成后的SiPM可以有效應對強光,但工藝尚不成熟。光電倍增管SiPM是多個SPAD的集成為一個像素,能夠產生強度效果,可以獲得更高的動態范圍以應對強光場景。但像素單元較大,較難做集成化,會導致芯片面積增大、工藝難度增加等問題。
4、掃描單元
(1)按掃描方式分類
掃描單元按照技術架構可以分為整體旋轉的機械式激光雷達、收發模塊靜止的半固態激光雷達以及固態式激光雷達。其中,半固態激光雷達具有微機電系統(MEMS)、轉鏡和棱鏡三種方案。固態激光雷達包括光學相控陣(OPA)和閃光激光雷達(FLASH)。
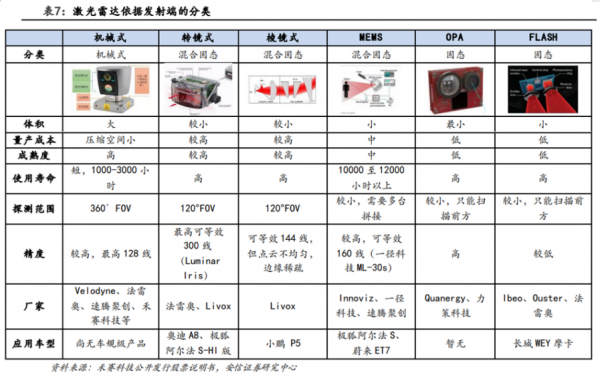
(2)機械式+半固態較為成熟,純固態式前路可期
長期來看,固態激光雷達由于不存在可活動部件,在成本和穩定性方面都有較大潛力,是技術上的最優解。而目前三種技術路線中,機械式最為常用,已經廣泛應用于Robotaxi等領域;半固態激光雷達是機械式和純固態式的折中方案(較機械式只掃描前方一定角度內的范圍;較純固態式仍有一些較小的活動部件),是目前階段乘用車量產裝車的主流產品。
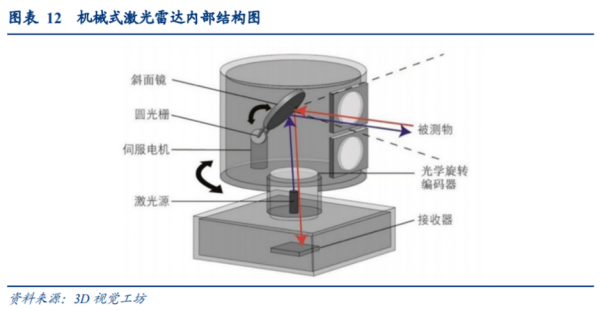
1)機械式雷達發展較為成熟,但因成本和部件冗雜難以實現車規級量產
機械式激光雷達的技術方案主要是高線數機械式方案。通過電機帶動光機結構整體旋轉的機械式激光雷達是激光雷達經典的技術架構,其技術發展的創新點體現在系統通道數目的增加、測距范圍的拓展、空間角度分辨率的提高、系統集成度與可靠性的提升等。相比于半固態式和固態式激光雷達,機械旋轉式激光雷達的優勢在于可以對周圍環境進行360°的水平視場掃描,在視場范圍內測距能力更強。但旋轉部件體積和重量龐大,且高頻轉動和復雜機械結構讓其內部的旋轉部件容易損壞,使用壽命相對較短,難以滿足車規的嚴苛要求。此外它靠增加收發模塊的數量來實現高線束,使得成本較高,亦限制了其大規模使用。目前,國內外主流廠商包括Velodyne、鐳神智能、速騰聚創等。
2)MEMS已經成為未來發展的重要方向,也是最有優勢的細分領域之一
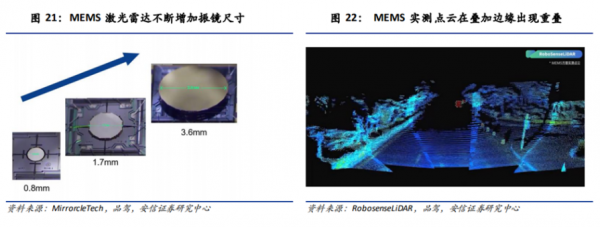
微機電系統(MEMS),是指尺寸在幾毫米乃至更小的高科技裝置,其內部結構一般在微米甚至納米量級,是一個獨立的智能系統。基于MEMS的微振鏡利用半導體工藝生產,不需要機械式旋轉電機,而是以電的方式來控制光束。其核心是一個微米尺度的振鏡,通過一個纖細的懸臂梁在橫縱兩軸高速周期震動,從而改變激光反射方向并實現掃描。
MEMS激光雷達由于僅有單個光源而大大減小了器件體積和功耗。其光路結構簡單,運動部件減少,可靠性相較機械式激光雷達提升很多。同時減少了激光器和探測器數量,成本大幅降低。其壽命在10000至12000小時以上,可以通過車規級認證。其缺點在于振鏡會造成產品的不穩定性:支撐振鏡的懸臂梁角度有限,覆蓋面很小,所以需要多個雷達進行共同拼接才能實現大視角覆蓋,這就會在每個激光雷達掃描的邊緣出現不均勻的畸變與重疊,不利于算法處理。另外,懸臂梁很細,機械壽命也有待進一步提升。
3)轉鏡、棱鏡技術:結構簡單相對低功耗,壽命長可靠性高
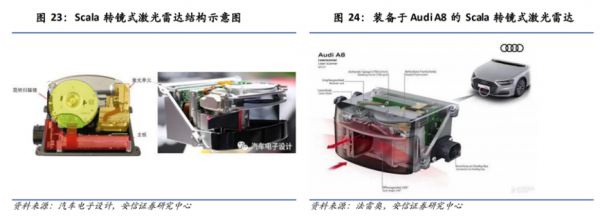
轉鏡激光雷達最早應用于車規級產品,目前是最主流的半固態方案。轉鏡方案固定了收發模組,用360°高速旋轉的多面棱形反射鏡來反射光束,完成激光雷達視野范圍內全視場角掃描。轉鏡的優點在于棱鏡、電機和發射器有更好的耐熱性和耐用性,因此更容易過車規,當前Valeo的運用轉鏡方案的Scala1已經通過車規認證。轉鏡被視為機械式向純固態進軍的必經之路,是短期上車主流,且未來很長一段時間半固態和純固態都將并行。
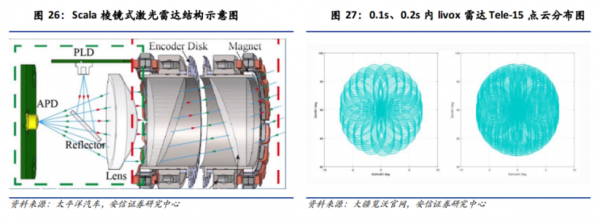
棱鏡技術原理為將兩個有斜面的柱狀鏡頭組合,可以利用光的折射控制激光的掃描方向,最終掃描出一個花瓣狀的區域。調整兩個棱鏡的轉速就可以控制掃描的區域,其掃描路徑不會重復,理論上如果掃描時間足夠久,棱鏡激光雷達可以掃描出前方每一個點的距離,具有高于其他技術路徑的視場覆蓋率和等效線數。但是棱鏡技術點云分布中央密集,邊緣稀疏,且控制棱鏡轉動難度較高。目前僅大疆覽沃實現量產。
4)OPA尚處于起步階段,制造難度和成本較高
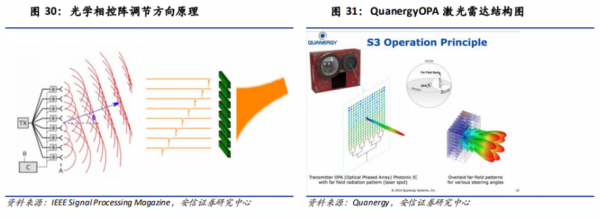
光學相控陣技術(OPA)通過施加電壓調節每個相控單元的相位關系,利用相干原理實現發射光束的偏轉,從而完成系統對空間一定范圍的掃描測量。雷達精度可以做到毫米級,且順應了未來激光雷達固態化、小型化以及低成本化的趨勢,但難點在于如何把單位時間內測量的點云數據提高以及投入成本巨大等問題,目前OPA產業鏈尚處于起步階段,真正投入使用的主要是美國的Quanergy公司。
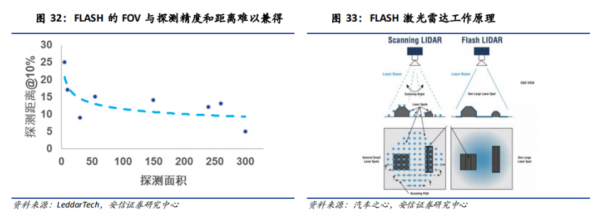
5)Flash激光雷達能快速記錄場景,但探測距離短板導致其應用受限
FLASH閃光激光雷達原理類似照相機,但感光元件與普通相機不同,每個像素點可以記錄光子飛行時間信息。通過在短時間內直接向前方發射出一大片覆蓋探測區域的激光,通過高度靈敏的接收器實現對環境周圍圖像的繪制。其具有結構簡單、尺寸壓縮空間較大和數據豐富的特點,是目前純固態激光雷達最主流的技術方案。然而受限于需要在有限功率下發射大面積的激光,其不得不降低單位面積上激光的強度,勢必會影響到探測精度和探測距離。因此還無法完成全路況的輔助駕駛,僅在較低速的無人外賣車、無人物流車等領域應用。代表品牌包括Ibeo、大陸、Ouster、法雷奧等。
5、信息處理單元
集成化方向發展,SoC替代FPGA是行業趨勢。激光雷達接收的信號需要在處理系統經過放大處理和數模轉換,經由信息處理模塊計算,獲取目標表面形態、物理屬性等特性,最終建立物體模型。現階段主控芯片FPGA為行業主流,遠期企業自研SoC有望逐步替代。目前FPGA主控芯片市占率較高,但隨著主流廠商對于性能及整體系統需求的提升,下一步的發展方向逐步向片上集成芯片(SoC)遷移。將探測器、前端電路、算法處理電路、激光脈沖控制等幾個不同模塊集成在一塊芯片內,能夠同時進行數據的采集與處理,甚至直接輸出點云圖像。國內外的SoC玩家主要包括禾賽科技、Mobileye、英特爾等。伴隨計算規模與存儲容量的增長,未來SoC將具備更高的集成度和更清晰的點云質量,或將逐步代替主控芯片FPGA。
(報告來源 :慧博資訊,原文標題:激光雷達行業深度:驅動因素、技術路線、產業鏈及相關公司深度梳理,內容有刪減)
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

