




簡介
步進電機、直流電機和無刷直流電機的主要區別在于它們的驅動方式。步進電機是以步階方式分段移動,直流電機和無刷直流電機通常則采用連續移動的模擬控制方式。由于步進電機采用步階移動,所以特別適合絕對尋址應用,目前市場上常見的步進電機已能提供每一步1.8°或0.9°的精確移動能力。步進電機采用直接控制方式,它的主要命令和控制變量都是步階位置 (step position);相形之下,直流電機則是以電機電壓做為控制變量,以位置或速度做為命令變量。直流電機需要反饋控制系統,它會以間接方式控制電機位置,步進電機系統多半則是以「開環」方式進行操作。
步進電機
步進電機可以根據電機結構、驅動架構和步進方式來分類。步進電機的結構有好幾種,包括可變磁阻 (variable reluctance)、永磁和混合式永磁 (hybrid permanent magnet),永磁步進電機的成本很低,多半用于價格低廉的消費性產品。混合式步進電機的價格略高,是工業移動控制應用最常見的電機。可變磁阻電機通常有3或5個相位,需要采用不同的驅動電路架構。
單極性 (unipolar) 和雙極性 (bipolar) 是步進電機最常采用的兩種驅動架構。單極性驅動電路使用四顆晶體管來驅動步進電機的兩組相位,電機結構則如圖1所示包含兩組帶有中間抽頭的線圈,整個電機共有六條線與外界連接。這類電機有時又稱為四相電機,但這種稱呼容易令人混淆又不正確,因為它其實只有兩個相位,精確的說法應是雙相位六線式步進電機。六線式步進電機雖又稱為單極性步進電機,實際上卻能同時使用單極性或雙極性驅動電路。
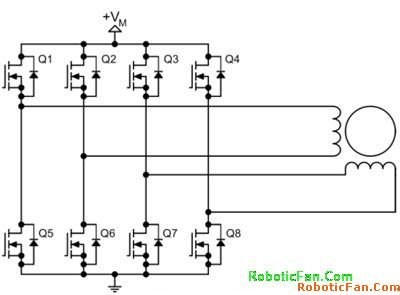
圖1:單極性步進電機驅動電路
雙極性步進電機的驅動電路則如圖2所示,它會使用八顆晶體管來驅動兩組相位。雙極性驅動電路可以同時驅動四線式或六線式步進電機,雖然四線式電機只能使用雙極性驅動電路,它卻能大幅降低量產型應用的成本。雙極性步進電機驅動電路的晶體管數目是單極性驅動電路的兩倍,其中四顆下端晶體管通常是由微控制器直接驅動,上端晶體管則需要成本較高的上端驅動電路。雙極性驅動電路的晶體管只需承受電機電壓,所以它不像單極性驅動電路一樣需要箝位電路。

圖2:雙極性步進電機驅動電路
直流和無刷直流電機
直流電機是最常見和成本最低的小型電機,并且廣泛用于各種應用。無刷直流電機宣稱能提供更高可靠性以及更低噪聲和成本,然而到目前為止,它卻只能在磁盤或計算機風扇等少數量產應用中取代傳統直流電機。在某些應用里,無刷直流電機有多項優點勝過傳統電刷電機,例如它以電子組件和傳感器取代電刷,不但延長電機壽命和減少維護成本,而且也沒有電刷產生的噪音。直流電機的特性使它成為調速系統最容易使用的電機。直流電機的硬件電路架構如圖3所示。
選擇正確的電機控制組件
為電機控制等特定應用選擇組件時,必須先了解這些組件的功能特色,然后在應用中充份發揮它們的各項優點。步進、直流和無刷直流電機通常是由提供有限控制功能的專用組件來控制,這些組件大都只有簡單的微處理器界面,系統效能因此受到很大限制。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

































 關注我們
關注我們

