






0 引言
隨著激光雕刻機的不斷發展和改進,嵌入式Linux的激光雕刻機比CNC(Computer numerical control)激光雕刻的優勢不斷顯現,它大幅度提高了處理能力,方便了設計開發,節約了成本,是未來經濟型激光雕刻機發展的趨勢。而嵌入式ARM(Advanced RISC Machines)Linux步進電機驅動是實現激光雕刻的核心。
嵌入式開發過程中,經常需要為特定設備開發驅動程序。這些驅動程序的編寫和編譯與PC上的Linux驅動開發相比存在明顯的差異,需要考慮的因素較多,實現過程較為復雜。本文以Samsung公司的友善之譬S3C2440開發板為例,探討如何使用嵌入式Linux開發字符設備驅動程序來驅動步進電動機。
1 硬件系統設計方案
控制系統由處理器、步進電機驅動器、步進電機3部分組成,如圖1所示。

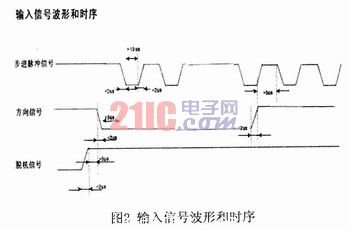
處理器用友善之譬QQ2440V3開發板,內核為ARM920T。步進電機驅動器采用北京和利時電機技術有限公司(原四通電機)的SH-20403。驅動器共有四路輸入信號:公共、脈沖信號輸入、方向信號輸入和脫機信號輸入。驅動器的輸入信號既可以采用共陽極也可以采用共陰極接線方式,使用共陽極模式時,應將輸入信號的電源正極連接到公共端,將輸入信號連接到對應的信號端子,信號低電平有效,此時對應的內部光耦導通,控制信號輸入驅動器中;對應共陰極模式時,將輸入信號的電源負極連接到公共端,信號高電平有效,我們采用的是共陽極接法。
控制步進電機驅動器的時序如圖2所示。
2 步進電機驅動系統設計
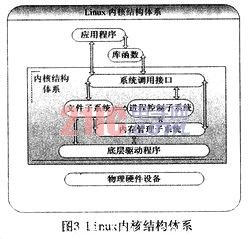
Linux內核結構體系可分為:應用程序、庫函數、操作系統(內核)、驅動程序。在Linux操作系統中,驅動程序是操作系統內核與硬件設備的直接接口,驅動程序屏蔽了硬件的細節,驅動程序是內核的一部分,它具有以下功能:
對設備初始化和釋放:比如向內核注冊這個程序,這樣應用程序傳入文件名時,內核才能找到相應的驅動程序。
對設備進行管理,包括實時參數設置以及提供對設備的操作接口。
讀取應用程序傳送給設備文件的數據并回送給應用程序請求的數據。
檢測是處理設備出現的錯誤。
如圖3所示,應用程序通過Linux系統的調用實現與內核通信。由于Linux中將設備當做文件處理,所以對設備進行操作的調用和對文件操作的操作類似,主要包括open()、read()、write()、ioctl()、close()等接口函數。應用程序發出系統調用命令后,會從用戶態轉到內核態,通過內核將openO等的系統調用轉換成對物理設備的操作。在Linux中通過分層實現對物理設備的調用,這樣使得內核的結構清晰,提高了模塊化的獨立性。
2.1 嵌入式Linux設備驅動程序的框架
Linux系統設備分成三種基本類型:字符設備、塊設備、網絡設備。每個模塊通常實現其中某一種:字符模塊、塊模塊或網絡模塊。
嵌入式設備驅動整體可分以下兩部分:
(1)硬件設備接口層。這部分主要描述驅動程序與設備的交互。
(2)驅動與內核接口層,它實現驅動模塊在Linux內核的注冊加載與卸除工作。
對于驅動程序與內核接口層,Linux提供了標準的入口點函數init_functionO;在通過模塊化的設計方法設計驅動程序時,使用insmod加載核心模塊時會調用本函數,通知內核對驅動程序進行注冊。模塊的卸除工作與加載工作類似,通過rmmod卸載模塊時,調用cleanup_funct-ion0取消驅動程序的注冊。
2.2 GPIO的步進電機驅動開發
GPIO(General Purpose Input Output)的步進電機驅動可以歸類為Linux設備驅動的字符設備驅動,以下是開發它的一些具體步驟。
2.2.1 開發步驟
(1)模塊化驅動程序
寫字符設備的驅動程序時,也要遵守模塊化編程的一般規范。設備模塊在用戶空間的初始化和終止:
Init_mnodule()向內核注冊模塊提供數據結構、局部和全局變量。
Cleanup_module()取消所有init_module在內核中的注冊。
(2)設備模塊在內核空間的內存申請和釋放
kmalloc()函數分配一段內存,這樣就實現了Chrdevs向量表中指向設備驅動程序名稱的指針。使用kfree釋放內存。
(3)字符設備主設備號和次設備號的分配
主設備號標志設備對應的驅動程序,內核利用主設備號將設備與相應的驅動程序對應起來。主設備號的取值范圍是O~255,如果不善加規劃,則容易造成主設備號的沖突。
次設備號由驅動程序使用,內核的其他部分并不使用它,僅將它傳遞給驅動程序。
(4)設備模塊在內核空間的注冊與注銷
字符設備的注冊有兩種方法,一種是常用注冊方法,通過系統函數registel_chrdev()將設備加入到系統設備列表中;另一種是devfs技術,通過系統函數devfs-regisrer()實現設備的注冊。注銷與注冊相反,分別調用unregister_chrdev()函數和devfs_unregister()函數。
(5)設備模塊在內核空間提供系統調用的函數設備驅動程序在注冊成功以后,用戶可以通過訪問設備特殊文件(一般情況在/dev目錄下)實現系統調用。
GPIO驅動程序只需要一個file operations數據結構體就可以了。
2.2.2 驅動開發
要寫實際的驅動,就必需了解相關的硬件資源。比如:用到的寄存器、物理地址、中斷等。在這里,它用到如下硬件資源,如表2所示。

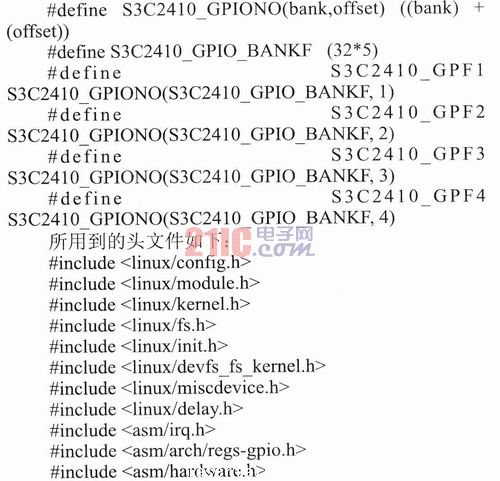
要用操作所用到的IO口,就要設置他們所用到的寄存器,我們需要調用一些現成的函數或者宏,比如:
/*每個port有16個引腳,而每個引腳由兩位來配置,所以你看到32×N。 32表示一個port的配置寄存器,而N代表是第幾個端口。而這里的offset表示的是第幾個引腳。*/
S3C2440開發板中GPIO的許多引腳是和地址線、數據線、串口線等引腳復用的。所以我們必須對GPIO進行重新定義和配置。一般來說,寫驅動可以在內核中找相近的驅動程序,以它為模板進行開發,有時也要從零開始,這次作者在內核Linux-2.6.13-qq2440\kernel2.6.13\drivers\char中的qq2440 led.c進行修改。

最后定義了file_operations和各種API函數,配置了init和exit函數以及module_exit和module_init。
驅動開發完后,要進行測試。把編寫好的驅動程序在PC機上進行交叉編譯。然后用命令#insmod stepper.ko加載模塊到內核中,通過命令#rmmod stepper.ko可以卸載模塊。用mknod/dev/stepper 1000 0建立與驅動程序相應的設備節點。編寫相應的應用程序。在應用程序中打開步進電機的設備文件,通過調用ioctl(fd,1&dir,O),運行應用程序,查看步進電機的轉向。
3 結論
本文在S3C2440開發板下實現了步進電機的控制。給出了簡單的驅動程序,實驗結果表明驅動運行正常、穩定。但對于實現傳能激光雕刻的圖形及灰度雕刻,還有待于進一步的完善。#p#分頁標題#e#
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

























 關注我們
關注我們

