




直角坐標機器人被廣泛應用于各種自動化生產線中完成碼垛搬運、上下料、供料、裝配、檢測、焊接和涂膠等任務。它以行程大,負載能力強,精度高,組合方便,性價比非常高,易編程,易維護等優點而深受各個行業專家和操作者的稱贊。但在完成一些需要進入小空間的作業時,不由關節機器人靈活。如果能把直角坐標機器人和關節機器人二者的部分功能及特點結合起來,就能保持直角坐標機器人優點的同時,擴張其應用領域及應用靈活性。為此一些企業和科學家不斷努力來實現這種組合。其中以DMT的混合型機器人最為典型,下面就對其簡單介紹。
一、混合機器人的組成
如圖1所示六自由度混合機器人由三個直線運動軸,兩個轉動軸和一個擺動軸組成。圖1中六自由度混合型機器人的三個直線運動軸是懸臂型直角坐標機器人。在上下運動的Z軸下端帶動一個旋轉軸,而旋轉軸帶動一個擺動軸,擺動軸末端再帶動一個旋轉軸。最末端的旋轉軸帶動手爪。由于兩個旋轉軸和擺動軸其實就是關節機器人的末端三個運動軸,所以六軸混合機器人就是三軸直角坐標機器人加上關節機器人的三個最末端運動軸組合而成。根據實際需要,混合型機器人的直線運動軸也可以是二維的XY軸結構或XZ軸結構,也可以是龍門式結構。其各個直線運動軸的行程及承載能力可以按要求去做。
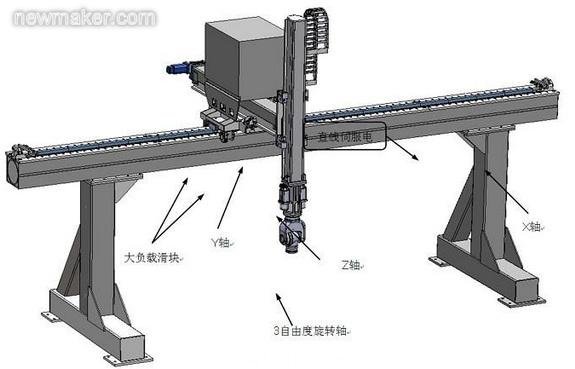
圖1是一個典型的3D直角坐標機器人,它由X軸,Y軸,Z軸及驅動電機組成。此外一個完整的機器人系統還需要控制系統和手抓
二、混合機器人的特點
1、工作空間
具有直角坐標機器人的大行程,大跨度的優點。比如拼裝后X軸可達到100m,Y軸20m;總之可以按要求組合成所需工作空間的大型機器人。
2、組合形式
混合型機器人的直線運動軸也可以是二維的XY軸結構或XZ軸結構,也可以是龍門式結構。根據每個直線運動軸的行程及承載能力還可以是多根組合來保證各個軸不變形,有足夠的強度。最末端的三個旋轉軸也可以選擇為兩個旋轉軸。總之混合型機器人完全可以設計成所以的結構形式及工作行程。
3、負載能力
直角坐標型的龍門框架結構,承載能力強,可無限擴展,穩定可靠,造價相對低很多。抓取物體的能力主要受三個末端旋轉軸的限制。目前配合手爪后可以抓取的物體重量是:25公斤,50公斤和100公斤三種型號。
4、工作精度
通常單根直線運動軸的重復定位精度0.05mm,而絲杠驅動型和精密齒輪齒條驅動型可達0.01mm,甚至更高。還可以加位置反饋信號,比如磁珊來提高定位精度。最后綜合精度取決于末端的三個旋轉軸。
5、安裝調式簡單
混合型機器人是模塊化結構,在裝配廠全部預連接運行,然后拆裝出廠。現場通過螺栓簡單拼裝,調水平即可電氣調試,用戶甚至可以自行完成機械安裝。龍門式框架為整個安裝空間,其工作空間也在框架范圍內。不需要非常專業人員調式,簡單安裝,調式和以后服務費用低。
6、后期維護費用低
不需要非常專業人員調式,簡單安裝,調式和后期維護費用低。而關節機器人的編程和操控必須由供應商通過專業培訓才能完成(廠家軟件編程費用300元/小時),而且特殊軟件需要收費。
7、性價比高:無論首次購買,還是后期服務費用都遠低于關節型機器人。

三、混合機器人的部分應用
1、除完成傳統的直角坐標機器人任務外,更適合給臥加和立加上下料。它的結構形式使手爪可以更方便伸入到機床防護罩內部的工作臺上。
2、如果被抓取工件給多臺設備上下料,需要對零件進行水平旋轉,甚至上下翻轉才能完成各個設備的上下料工作,那么混合型機器人就非常合適。這類應用非常多,比如一臺機器人同時給車床和淬火設備上下料。
3、無論是冷沖壓,還是熱沖壓有時需要把鋼板伸入到上下模中間,那么混合機器人就非常合適。還有一些立式加工中心的防護門全開時,零件也不能從正上方向放下,要從前面伸到里面去。
總之需要從側面把零件伸到工作臺上方,或零件從一臺設備到令一臺設備間搬運時必須旋轉或翻轉,這類大負載的搬運和上下料應用等,混合機器人是非常合適的
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

































 關注我們
關注我們

