




四、順序控制多步同輸出的編程方法
順序控制是生產現場常見的一類控制任務,步進指令是PLC指令庫中專用于順序控制的。步進指令編程時,根據工藝流程將程序劃分為一個個獨立的程序段,執行時,CPU嚴格按梯形圖編程順序,只有執行完前一段程序后才能激活下一段程序,并在下一段程序執行之前,將前面程序段復位。并且在語法上要求各程序段所使用的輸出不允許重復。這在解決順序控制任務中有多步同輸出的情況時,就帶來了一定的困難。借助于內部通用繼電器可方便解決這一難題。如某一順序控制任務如以下流程圖(圖8)所示。
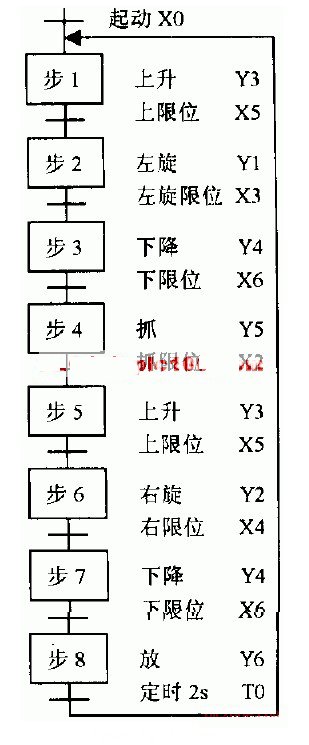
圖8 某機械手動作流程圖
從機械手動作流程圖可以看出,這個控制任務每個循環的工作可以劃分為八步,其中第1步與第5步動作相同,均為上升;第3步和第7步動作相同,均為下降。在利用步進指令進行編程時,這兩個工步所對應的程序段的輸出不能直接設置為Y3、Y4,同一個輸出使用兩次則會出現語法錯誤。這時應考慮使用用于存儲中間狀態的內部通用繼電器Rn來解決這個問題。如圖7所示梯形圖程序,其中R1、R5分別被定義為第1步與第5步的輸出,R3、R7分別被定義為第3步與第7步的輸出,在步進結束后再將R1、R5的狀態輸出到上升Y3,將R3、R7的狀態輸出到下降Y4,通過這樣的方法可方便解決順序控制任務中若干工步輸出相同的問題。
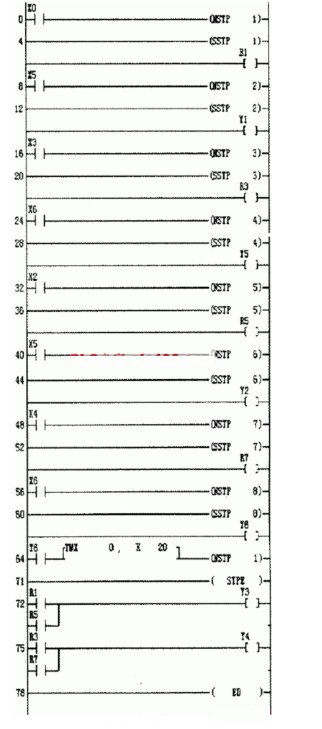
圖9 機械手控制梯形圖
五、結束語
初學者對于PLC的基本應用易于掌握,但要做到靈活使用仍需對一些技術難點和使用技巧深刻理解。在編程之前,要對控制任務進行認真分析,合理選擇外部設備和編程元件,并以此為基礎進行編程;在編程過程中,如能靈話巧妙地使用編程元件,合理地進行程序編排,可使程序邏輯清楚,可讀性增強。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

































 關注我們
關注我們

