




3.3SA4828芯片的控制功能
對SA4828芯片的控制是通過微處理器接口將數據送入內部的兩個寄存器來實現的。它們是初始化寄存器和控制寄存器。
初始化寄存器用于設定和電機及逆變器有關的一些基本參數,這些參數在電機工作前就被初始化,并且在電機工作時一般不允許改變。
控制寄存器在電機工作過程中控制脈寬調制波的狀態,從而進一步控制電機的運行,比如轉速,正/反轉,起動和停止等。通常在電機工作時寄存器的內容經常被改寫以實現對電機的實時控制。
由于受到8位數據接口的限制,數據需首先讀入六個臨時寄存器R0、R1…R5中,這些數據隨即被送入相應的初始化寄存器或控制寄存器。新的數據只有在寫入對應的寄存器中時才能真正地發揮作用。
數據的傳送是通過寫入虛擬寄存器的操作來實現的。如寫寄存器R14是將初始化數據傳送到初始化寄存器中,寫寄存器R15則是將控制數據傳送到控制寄存器中。 由于R14、R15并不是實際的寄存器,因此什么數據被寫入并不重要,往這里寫數據的操作才真正執行往初始化寄存器或控制寄存器中傳送數據的操作。
(1)初始化寄存器的編程
初 始化寄存器將確定如下參數:載波頻率,電源頻率范圍,脈沖延遲時間,脈沖取消時間,波形選擇,醫學治療儀專用變頻器的研制幅值控制,計數器復位(這個功能 可使SA4828內部將調制頻率計數器置為0,此時禁止正常的頻率控制操作,每一相輸出占空比為50%的脈沖),軟件復位等。這些參數由相應的控制字確 定,而這些控制字在送到32位初始化寄存器之前,先要分別送到4個8位寄存器R0、R1、R2和R3中。:
①載波頻率選擇
R0中的CFS字稱為載波頻率選擇字,設n為與CFS字相對應的十進制數,則實際載波頻率fc為:fc=
式中fk為外部時鐘頻率。
②輸出電源頻率范圍選擇
R0中的FRS字稱為電源頻率范圍選擇字,設m為與FRS字相對應的十進制數,則實際的輸出電源頻率fr范圍為:fr=
③脈沖延遲時間選擇
R2中的PDY字為脈沖延遲時間選擇字,設x為與PDY字相對應的十進制值,則實際的脈沖延遲時間Tpdy由下式確定:Tpdy=
④脈沖取消時間選擇
R1中的PDT字為脈沖取消時間選擇字,設y為與PDT字相對應的十進制值,則實際的脈沖取消時間Tpdt由下式確定:Tpdt=![]()
應該指出的是,由于脈沖延遲電路跟在脈沖刪除電路之后,故輸出的PWM脈沖的實際最小寬度將比設定的脈沖取消時間為窄,這個實際的最小脈沖寬度為TpdtTpdy。
⑤波形選擇
R3中的WS1、WS0兩位用于確定輸出的電源波形。波形可由具體的數學表達式來表示。
⑥幅值控制(AC)
R3中的幅值控制位(AC)定義了三相波形幅值的受控方式。當AC=0(芯片默認值)時,控制寄存器內紅色相幅值,寄存器用于控制所有三相調制頻率的幅值。而當AC=1時,采用三個獨立的幅值寄存器分別控制對應相調制頻率的幅值。
⑦計數器復位(CR)
當R3中的計數器復位CR=1時,紅色相相位計數器設置為0,此時禁止正常的頻率控制操作,每一相輸出占空比為50%的脈沖。
⑧軟件復位(RST)
R3中的RST=1時,將整個芯片復位為初始化默認狀態,它的效果與硬件復位腳RST等同。
(2)控制寄存器的編程
控制寄存器是一個48位寄存器,控制寄存器的數據以8位為一個單元分別讀入臨時寄存器R0~R5中,然后通過寫虛擬寄存器R15將R0~R5中的數據
圖4SA4828的內部調制波形
(a)正弦波(b)基波加三次諧波(c)帶有死區的基波加三次諧波
①電源頻率選擇
輸出電源頻率可在最大電源頻率范圍內線性地調節,它由一個16位的電源頻率選擇字“PFS”決定,整個電源頻率范圍被劃分為65536等分。由于PFS字跨 越兩個臨時寄存器R0、R1,所以當改變輸出電源頻率時,必須在寫虛似寄存器R15之前同時刷新這兩個臨時寄存器的值。
電源頻率fp由下式決定:fp= Pfs
Pfs
式中:Pfs為16位PFS選擇字的十進制值。
②電源幅值選擇
輸出電源的幅值正比于內部ROM中的采樣值和8位幅值選擇字(RAMP、BAMP、YAMP)的值。幅值的百分比計算公式如下: APOWER=100%
APOWER=100%
式中:A為8位幅值選擇字的十進制值。
值得注意的是,初始化寄存器中的幅值控制位(AC)決定了紅色相幅值寄存器的值是否用于控制所有的三相輸出幅值。
③正/反轉選擇
三相PWM輸出的相位決定于R2中的F/R選擇位:
F/R=0正轉相序為紅黃蘭;
F/R=1反轉相序為蘭黃紅。
在正反轉切換時,輸出波形仍保持連續。
④輸出禁止選擇
當R2中的輸出禁止位(INH)有效(為1)時,所有的PWM輸出變為低電平狀態,而芯片內部其他操作并不受影響。該位被釋放后所有的輸出立即恢復原狀。
需要注意的是,輸出禁止電路在脈沖刪除和脈寬延遲電路之后,因此在輸出禁止的初期有可能產生一些過窄的脈沖。
3.4SA4828芯片編程實例
本例的變頻器采用12.288MHz時鐘。初始化寄存器設計的具體參數如下:
載波頻率3kHz
電源頻率15Hz
脈沖取消時間10μs
脈寬延遲時間5μs
電源波形抑制了三次諧波的波形
幅值控制三相幅值對稱
(1)初始化寄存器編程實例
①設定載波頻率 由fc=
由fc=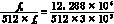 得2n==8
得2n==8
則n=3R0中的CFS字為011H
②設定輸出電源頻率范圍 由fr=2m
由fr=2m 得2m==2
得2m==2
則m=1,R0中的FRS字為001H。
③設定脈寬延遲時間 由Tpdy==5μs
由Tpdy==5μs
可得x=64- (Tpdy×fc×512)=56.32
取整數56,則R2中的6位PDY字為111000H
④設定脈沖取消時間
由于實際輸出PWM脈沖的最小脈寬為TpdtTpdy,所以在設定最小脈沖取消時間時,應加上脈寬延遲時間。
因此在本例中實際最小脈沖寬度應為10μs+5μs=15μs 由Tpdt=
由Tpdt=
可得y=128- (Tpdt×fc×512)
=128-(15.2×10-6×3×103×512)
≈104.65
取整數104,則R1中的PDT值為01101000H
⑤設定波形選擇,幅值控制等
選 擇輸出波形為基波加三次諧波,故WS1=0,WS0=1,無用戶輸出選擇,故OPT1=0, OPTO=0。設定幅值控制位AC=0,選擇三相平衡幅值控制方式,正常工作時計數器復位和軟件復位均無效,故 CR=RST=0。所以R3中的二進制代碼為00000001。綜上所述,初始化寄存器中:
R0=0010001123H
R1=0110100068H
R2=0011100038H
R3=0000000101H
(2)控制寄存器編程實例
根據治療儀控制的具體要求,變頻器輸出頻率最高不超過10Hz,相應電機轉速為280r/min。由于輸出頻率需要隨時調整,利用80C196KC單片機的 模擬量輸入通道CH0,輸入經5.1kΩ電阻和10kΩ電位器將+5V電源電壓分壓后提供的電壓信號。80C196KC的模擬量轉換為10位精度,給分壓 電位器提供的最高電壓約3.3V左右,采樣碼為680。由于SA4828的輸出電源頻率精度為16位,必須將10位采樣值左移6位,然后將其低位送入臨時 寄存器R0,高位則送入R1。
由于采用VVVF控制,幅值與電源頻率成正比,可得頻率設定電位器的采樣值,A×15/50,再右移2位后送入臨時寄存器R3。由于采用三相平衡幅值,R4、R5可以不賦值。
輸出禁止無效,故INH=0,正反轉F/R是周期性改變的,開始半擺為正轉,F/R=0,故R2=0,以后每次要改變方向時,將R2的D0位取反即可。
擺幅控制則可通過一只10kΩ電位器將+5V電源電壓分壓后送入80C196KC的模擬量輸入通道CH1實現。
4治療儀控制功能的實現
4.1失速控制
通過將SA4828的最高調制頻率設定為10Hz,其轉速為280r/min,稍高于250r/min,留有一定的調節余量。
4.2擺幅控制
當電機以最高轉速250r/min旋轉時,經1/50減速器后,轉速為5r/min=1800°/min=30°/s。100°/(30°/s)=3.33s。200°/(30°/s)=6.67s。若以100ms為控制周期,則全擺幅周期T為: T=67×
T=67×
式中:t為擺幅輸入采樣值;
f則為轉速輸入采樣值。
剛 開始的第一次擺動應從中間開始正轉,故T1=T/2。經過以上處理,就將位置控制變成了定時時間控制,不僅省去了不易調整的位置開關,也使轉速及擺幅的控 制方便多了。通過兩只電位器就可實現快速、便捷的控制。停車時,由操作人員根據目測,到中心位置時按下轉/停開關即可準確停車,且每次轉動時均從中心位置 開始正轉半幅,然后全幅往復運行。由于通過SA4828實現了0Hz直流制功,即實現了準確停車,又不會將電機制動時產生的再生能量反饋回直流環節的極性 電容,避免了泵升電壓的產生。
5結論
(1)用SA4828設計的變頻器,接口簡單,功能強,控制精度高,使用方便,能構成高性能的變頻調速系統,SA系列PWM控制器在變頻調速領域具有很好的應用前景。
(2)16位單片機控制提高了系統的智能化,控制速度快,系統性能改變方便,控制、保護、人機界面功能強。
(3)通過在醫學治療儀上的實際應用證明,變頻控制系統工作安全可靠,頻率控制精度及穩定度高,輸出諧波含量小,低速運行特性好,起動轉矩大,停車準確、迅速。轉速及擺幅調節極其方便。作為特殊應用的專用變頻器設計,具有推廣價值。
| WS1 | WS0 | 波形 |
|---|---|---|
| 0 | 0 | 正弦波(默認值) |
| 0 | 1 | 三次諧波(諧波送加) |
| 1 | 0 | 帶死區的三次諧波 |
| 1 | 1 | 留給用戶波形 |
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
|---|---|---|---|---|---|---|---|---|
| R0 | FRS2 | FRS1 | FRS0 | × | × | CFS2 | CFS1 | CFS0 |
| R1 | × | PDT6 | PDT5 | PDT4 | PDT3 | PDT2 | PDT1 | PDT0 |
| R2 | × | × | PDY5 | PDY4 | PDY3 | PDY2 | PDY1 | PDY0 |
| R3 | RST | CR | AC | OPT1 | OPT0 | × | WS1 | WS0 |
表1SA4828管腳說明
| 引腳 | 名稱 | 類型 | 功能 | 引腳 | 名稱 | 類型 | 功能 |
|---|---|---|---|---|---|---|---|
| 1 | AD3 | I | 地址/數據復用 | 15 | BPHB | O | 藍色相,下電源開關 |
| 2 | AD4 | I | 地址/數據復用 | 16 | VSS | P | 電源負極(0V) |
| 3 | AD5 | I | 地址/數據復用 | 17 | BPHT | O | 藍色相,上功率開關 |
| 4 | AD6 | I | 地址/數據復用 | 18 | YPHT | O | 黃色相,上功率開關 |
| 5 | AD7 | I | 地址/數據復用 | 19 | SETTRIP | I | 置輸出斷開 |
| 6 | WR | I | 寫選通 | 20 | RPHT | O | 紅色相,上功率開關 |
| 7 | RD | I | 讀選通 | 21 | WSS | O | 同步波形采樣 |
| 8 | ALE | I | 地址鎖存選通 | 22 | ZPPR | O | 過零脈沖(紅色相) |
| 9 | RST | I | 硬件中斷 | 23 | RS | I | 寄存器選擇 |
| 10 | CLK | I | 時鐘輸入 | 24 | MUX | I | 總線選擇 |
| 11 | CS | I | 片選 | 25 | VDD | P | 電源正極 |
| 12 | TRIP | O | 關斷狀態 | 26 | AD0 | I | 地址/數據復用 |
| 13 | RPHB | O | 紅色相,下功率開關 | 27 | AD1 | I | 地址/數據復用 |
| 14 | YPHB | O | 黃色相,下功率開關 | 28 | AD2 | I | 地址/數據復用 |
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
|---|---|---|---|---|---|---|---|---|
| R0 | PFS7 | PFS6 | PFS5 | PFS4 | PFS3 | PFS2 | PFS1 | PFS0 |
| R1 | PFS15 | PFS14 | PFS13 | PFS12 | PFS11 | PFS10 | PFS9 | PFS8 |
| R2 | × | × | × | × | × | × | INH | F/R |
| R3 | RAMP7 | RAMP6 | RAMP5 | RAMP4 | RAMP3 | RAMP2 | RAMP1 | RAMP0 |
| R4 | BAMP7 | BAMP6 | BAMP5 | BAMP4 | BAMP3 | BAMP2 | BAMP1 | BAMP0 |
| R5 | YAMP7 | YAMP6 | YAMP5 | YAMP4 | YAMP3 | YAMP2 | YAMP1 | YAMP0 |
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

































 關注我們
關注我們

