






1 引言
風力發電機組的控制系統是綜合性控制系統,控制系統不僅要監視機組運行參數,對機組進行并網與脫網控制,而且還要根據風速與風向的變化,對機組進行優化控制。CAN總線是一種支持分布式控制系統和實時性控制的串行通信網絡。其以多主機方式工作,通信速率可達1mbps。
can總線的上述特點正適用于風力發電機控制系統的獨特要求,因此,本文提出一種基于can總線架構的風力發電控制系統。控制系統中各模塊之間通過can總線實時交換數據,實現主控系統及各控制節點間的實時通信與數據交換。文章在分析了can協議及can獨立控制器sja1000工作原理和讀寫邏輯的基礎上,設計了can接口,給出了硬件原理圖,分析了can通訊程序流程及系統中信號和控制指令的通訊幀格式。另外,本文還給出了基于嵌入式qt的應用程序的設計方案。
2 系統結構與功能
本文基于分散控制系統理念,針對雙饋型變速恒頻風力發電機組設計控制系統。雙饋型風電機組控制系統基本結構如圖1所示。
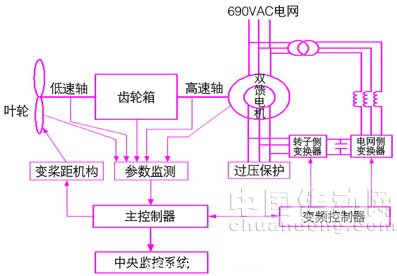
圖1 雙饋型風電機組控制系統基本結構
主控制器選用32位嵌入式處理器at91rm9200,通過硬件設計擴展外圍can接口,實現與其它節點的通信。同時外接帶觸摸屏的lcd顯示器,監控界面利用嵌入式qt設計,對整個機組實時監控。主控制器通過以太網與風電場控制中心通信。變流器控制采用雙pwm控制方式,即由兩個dsp生成pwm信號,電機側部分負責電機勵磁控制,網側負責并網控制;兩模塊均基于tms320f2812設計,通過其自帶的ecan接口與主控制器及其它節點通信。變槳控制系統同樣基于arm(at91rm9200)設計,擴展can接口實現通信。變槳控制器和變頻控制器通過i/o通道采集接收各傳感器數據,并進行相關計算與判斷,輸出控制信號,實現智能分散控制,同時向主控制器發送機組參數并接收主控命令。整體結構框圖如圖2。
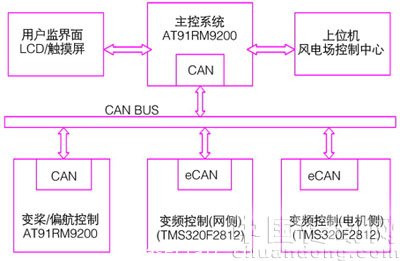
圖2 風力發電機組控制系統整體結構
主控制器位于地面控制柜,變槳控制器位于機艙控制柜,變頻控制器分電機側和網側兩部分,位于地面控制柜。模塊與模塊之間can總線信號經光電轉換后使用光纖連接。
3 CAN接口硬件設計
can是一種基于廣播的通訊機制,報文依靠報文標識符來進行識別。can協議支持兩種幀格式,不同之處在于標識符域的長度不同,一種被稱為can標準幀,支持11bit的標識符長度;另一種稱為can擴展幀,支持29bit的標識符。#p#分頁標題#e#
can接口芯片選用philips公司的can獨立控制器sja1000。arm處理器at91rm9200內部集成了外部總線接口ebi,通過此接口與sja1000連接。從sja1000輸出的can信號,通過光藕器件隔離后連接到收發器tja1050,收發器的輸出與總線連接。
sja1000的地址線和數據線是分時復用的,而at91rm9200的外部數據總線接口ebi的地址線和數據線是相互獨立的,因此,需要通過軟件編程實現地址的鎖存,以達到數據和地址的分時傳輸。硬件原理圖如圖3[3]。
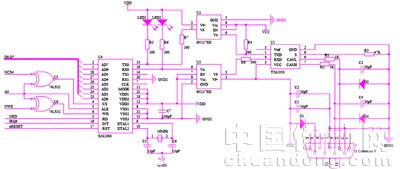
圖3 CAN接口硬件原理圖
sja1000的數據/地址復用總線直接與arm的ebi數據總線低8位連接,地址鎖存信號/ale由arm的a0產生,/cs與/we分別由ncs4和new與a0經或運算后產生。由硬件電路可確定sja1000的物理地址是0x50000000。
風電場環境惡劣,為了保證控制系統準確傳輸數據,增強can總線節點的抗干擾性能, sja1000控制器經過高速光藕6n137隔離后與收發器tja1050相連,實現總線上各can節點之間的電氣隔離。采用dc-dc電源隔離模塊dcr010505,實現光耦兩端的電源隔離。canh接總線的高電平端,canl接總線的低電平端。由于風電機組垂直距離較高,容易受雷電的影響,在兩根can總線輸入端與地之間分別并聯一30pf的電容和一防雷擊管,以濾除高頻干擾和防止浪涌電壓。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

























 關注我們
關注我們

