





如今3D打印機所面臨的一個問題是,它們的打印尺寸實際上是受到3D打印機的大小限制的。如果要打印一棟房子,你就需要一臺比房子大的3D打印機(除非分開打印)。這就嚴重限制3D打印機嘗試打印更大物體的能力,為了解決這一問題,總部位于巴塞羅那的加泰羅尼亞先進建筑研究所(IAAC)的一隊研究人員,在Sasa Jokic和Petr Novikov的帶領下,開發出了一種可自主移動的3D打印機器人Minibuilders,這種機器人可以像建筑工人那樣來回移動,構建大型物體,如建筑物等。
“在建筑行業,我們已經有整整一個世紀沒有看到任何顛覆性的技術出現了。”IAAC研究團隊說,“我們相信,機器人和增材制造將在未來的建筑行業發揮關鍵作用。”
Minibuilder包括三種不同的機器人裝置,每種機器人尺寸不大于42厘米。盡管其體積小,但它們能夠打印幾乎任何建筑物。據了解,這三種機器人,各自擁有不同的功能,可以在大型3D打印項目中進行分工協作。
地基(Foundation)機器人
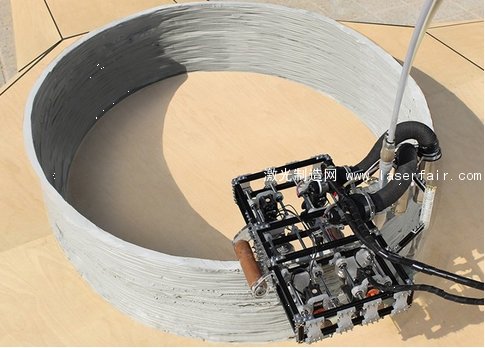
這是進入施工現場的第一個機器人。它使用軌道以及帶線的傳感器四處走動,識別項目的大致輪廓。這種機器人舉著打印頭逐層堆積打印對象,打印頭也隨之升高,當打印對象的高度升到地基(Foundation)機器人接觸不到的地方時,就輪到下一個機器人出場了。
抓握(Grip)機器人
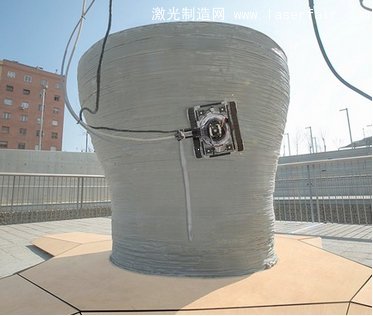
這種機器人使用四個滾輪將自己夾在構建對象的頂部。每個滾輪都與旋轉和轉向致動器相連接,這樣機器人可以很精確地將自己定位在打印對象指定的區域上,并開始3D打印。由于這個機器人需要在之前打印結構的上面作為固定自己的支撐,所以3D打印材料的干燥固化速度需要非常快,這樣才能支持下一層的打印。為了加速材料的干燥固化,抓握(Grip)機器人還配置了加熱器。一旦打印對象的結構和形狀3D打印完成,最后一個機器人就出現了。

真空(Vacuum)機器人
這是MiniBuilder施工過程中的最終機器人。它使用一個真空的吸盤,以使自己附著到3D打印對象的表面上。這種機器人的目的是為了加強其已打印的結構。要做到這一點,它通過兩條軌道在結構上反復上下移動,以幾乎垂直于其他層的方式打印材料,為一些更大的物體提供結構支撐。
理論上說,一起工作的這些Minibuilders機器人能夠3D打印無限大的對象,而不再受3D打印機自身尺寸的限制。雖然目前這項技術可能尚未完善,但顯然研究人員已經邁出了第一步。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

























 關注我們
關注我們

