




對于機器而言,視覺是測距的過程,雷達或是紅外線傳感器發射的光束打在障礙物上會反射回來,通過發射到反射回來的時間計算出距離,從而知道那個位置有某個東西存在。
機器視覺遠不能達到人眼的效果,但機器的優勢在于可以穿透障礙物看到它背后的東西。今年早些時候,麻省理工學院研發了一款微波攝像機,可以拍到障礙物背后的3D圖像。這款攝像機與微軟最新的Xbox Kinect感測器的工作方式相同,發射微波脈沖并追蹤獲得反饋的時間,并利用計算機成像技術生成圖像。但是這種成像技術很慢,需要花費較長的時間。如果你想知道拐角處是否有車過來,它是沒辦法及時做到的。

由ScanLAB Projects制作的無人駕駛汽車的“眼中”世界
英國赫瑞·瓦特大學的物理系博士生 Genevieve Gariepy和她的同學們一起研發了一套跟激光雷達類似的系統,不過反應更快更靈敏,它可以在短短幾秒鐘檢測出隱藏的物體。
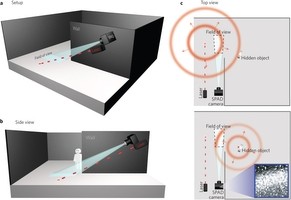
該攝像頭采用回聲定位技術,定位盲區附近的物體。同時,其先進的攝像頭模塊非常敏感,它可以跟蹤單個光子的光。系統會向周圍發射數百萬的脈沖波,當這些脈沖波到達地面后會以球狀波發散出去,碰到障礙物后會再反射回來,當這些反射回來的光出現在攝像頭的“視線”范圍內,通過計算來回的時間,就可以判斷出障礙物的位置。攝像頭以200 億幀/秒的速度進行拍攝,位置的精確度能達到厘米。
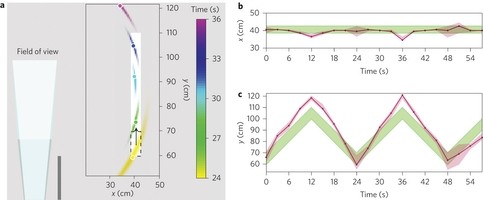
根據他們在Nature Photonics上發表的論文,他們用一個30厘米高的泡沫小人當做實驗對象,讓小人以每秒2.8cm的速度移動,在這個過程中監測出小人的具體位置。Gariepy表示目前他們只是通過這個實驗證實了這個概念的可能性,未來他們希望將這項技術應用于真實的環境中,比如汽車系統,可用于避免汽車的碰撞。

step 1:觀察角落
step 2:定位隱藏物體
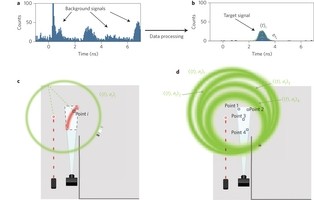
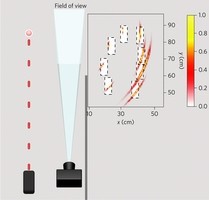
step 3:計算出具體位置
step 4:運動目標的移動跟蹤
團隊希望能更快更遠地檢測。現在得到具體位置需要花費5秒鐘,3秒鐘是SPAD相機用來接收數據,另外2秒是用來計算的。他們希望將整個過程壓縮到1秒。而在檢測距離上,目前只能檢測到1米左右距離的物體,而他們希望能實現10米的檢測。
現在的無人駕駛汽車同樣使用的是激光雷達來檢測前方是否有障礙物,從而保障交通安全。但面對現實生活中無處不在的變數,無人駕駛需要更加明慧的“眼睛”才能將安全風險降到最低。當然,他們也同時面臨一些激光雷達普遍存在的問題,比如當空氣中有霧、有灰塵、有煙時,是無法進行檢測的。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

































 關注我們
關注我們

