






納米天線陣列LiDAR
Oryx Vision憑借納米天線陣列LiDAR,找到了困擾自動駕駛汽車商業化的主要問題:如何平衡探測距離、精度和成本三者的關系。OryxVision深度傳感器可以檢測到150米遠的微小物體,它既可以在暗夜里工作,也不會受直射的陽光影響,而即使在雨霧等極端天氣條件下也可以穩定工作。OryxVision傳感器可以無縫集成到車輛的四周,一組這樣的傳感器不但可以提供360°范圍的高性能的景深探測覆蓋,而且價格低廉。
Oryx Vision使用的是長波太赫茲紅外激光的激光器,因為這種紅外光人眼不可見,功率更高。而這種紅外光還很難被水吸收,不會被云霧、強烈的陽光直射所干擾。當發射出的激光反射回傳感器時,光學器件將反射回的入射光引導到大量極小的整流納米天線上。入射光在被整流的天線中產生AC響應,換句話說,被轉換成DC信號。該系統的靈敏度是傳統LiDAR的上百倍。因為天線將入射光處理為波,所以它們還可以檢測到多普勒效應(由于其反彈的相對運動而引起的頻率變化),并且由此還可以確定在道路中或附近的其它物體的速度。
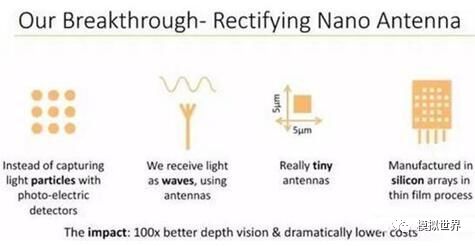
Oryx Vision采用的納米天線只有25平方微米,使用薄膜芯片制造工藝直接在集成電路上制造。每個納米天線只有5 x 5平方微米,使用薄膜芯片制造工藝在硅晶圓上形成陣列,成本相當低廉。而且這將使得信號被饋送到機器學習系統相當簡單,而這個機器學習系統可以對場景中的對象進行分類,從而使得對場景的感知更加智能化。
泛光(Flash)面陣式LiDAR
泛光面陣式是全固態LiDAR中比較主流的技術之一。Flash LiDAR 屬于非掃描式雷達,發射面陣光,是以2維或3維圖像為重點輸出內容的激光雷達。雖然穩定性和成本不錯,但主要問題在于探測距離較近。對于泛光成像LiDAR,每次發射的光線會散布在整個視場內,這意味著只有一小部分激光會投射到某些特定點。此外,光電探測器陣列中的每個像素都必須非常小,限制了它可以捕捉的反射光量。
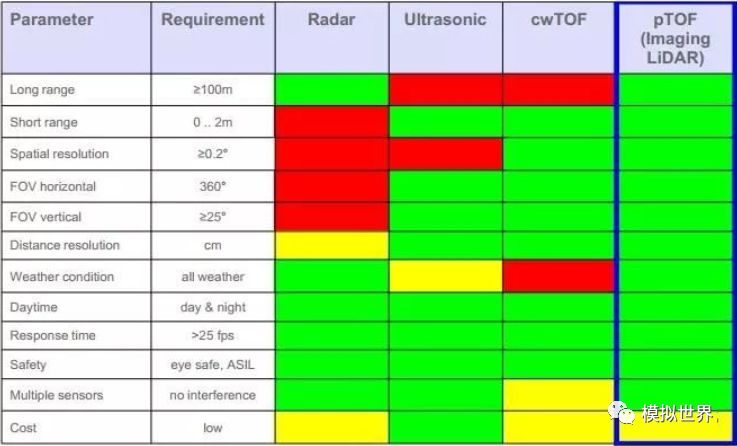
泛光面陣式LiDAR的激光光源主要有兩種方式:脈沖和連續波,分別對應脈沖飛行時間(pToF,PluseToF)LiDAR和連續波飛行時間(cwToF,Continuous Wave ToF)LiDAR。pToF LiDAR采用脈沖,可以實現遠距離探測(如100米以上);而cwToF LiDAR采用連續波,主要進行近距離探測(如數十米)。泛光面陣式LiDAR屬于非掃描式LiDAR,通過脈沖或連續波捕獲整個場景,而非用激光束逐點掃描。由于探測電子返回脈沖和帶寬較寬的弱點,泛光面陣式LiDAR易受噪聲影響,而閾值觸發可引起測量誤差Δt。下圖是cwToF LiDAR、pToF LiDAR、雷達和超聲波傳感器的參數對比。
由激光雷達的理論可知,在功率受限的情況下,要實現遠的探測距離,則要求大的脈沖時寬,而要實現高的探測精度,則需要大的帶寬,簡單脈沖時寬帶寬乘積接近于1,時寬與帶寬相互關聯,不能同時增大時寬與帶寬。pToFLiDAR則通過增益調制式脈沖激光源,可以解決采用連續波激光器發射正弦波在對目標成距離像時限制了激光器的瞬時功率從而嚴重影響成像質量和測量范圍的問題。
多束密集的激光束直接向各個方向漫射,因此只要一次快閃就能照亮整個場景。它運行起來更像攝像頭。隨后,系統會利用微型傳感器陣列采集不同方向反射回來的激光束。
Flash LiDAR 的一大優勢是它能快速記錄整個場景,避免了掃描過程中目標或激光雷達移動帶來的各種麻煩。不過,這種方式也有自己的缺陷。Flash面陣式LiDAR的主要缺點是光子預算:一旦距離超過幾十米,返回光子的數量就太少,根本無法進行可靠的探測。如果不是對場景進行光覆蓋,以犧牲切向分辨率為代價,用網格點狀結構光來照明,這就可得到改善。垂直腔面發射激光器(VCSELs)使其可在不同方向同時發射成千上萬的光束。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀
























 關注我們
關注我們

