




據外媒報道,由浙江工業大學,天津大學,南京理工大學和立命館大學組成的研究聯盟已使用3D打印創建了柔軟的機器人手指。這項研究旨在證明了多材料3D打印不僅可以用于制造軟致動器,還可以用于制造功能傳感器。
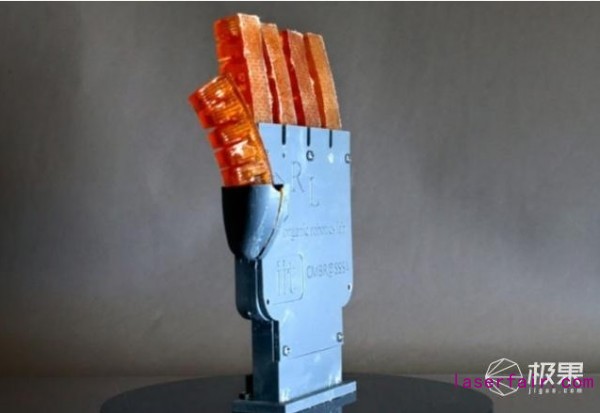
據悉,該機器人手指由嵌入式單電極摩擦電曲率傳感器(S-TECS)驅動,在無外部電源的情況下,依然可以以超低工作頻率下感應彎曲曲率。研究人員希望這項創新將為簡單、快速的制造過程鋪平道路,未來可以生產可控的軟機器人。
使用軟材料和順應性結構的混合物構造機器人正日益為應對人口老齡化帶來的挑戰提供解決了方案。隨著軟機器人研究的發展和新制造方法的發展,人機交互變得越來越安全,并為該技術開辟了新的應用。現在,已經可以實現直接打印具有氣密性復雜結構和硬組件的軟機器人,例如Wyss Institute于2015年生產的 3D打印跳躍機器人。
據研究聯盟的成員的爆料,這款柔軟的機器人手指在設計之初已將基于壓電,導電,磁性和有機光學材料的軟件傳感器集成到其軟件機器人設計中。不過,這些傳感器可能具有諸如原型制作時間長,電纜連接不穩定,系統組裝復雜以及系統集成困難等缺點。
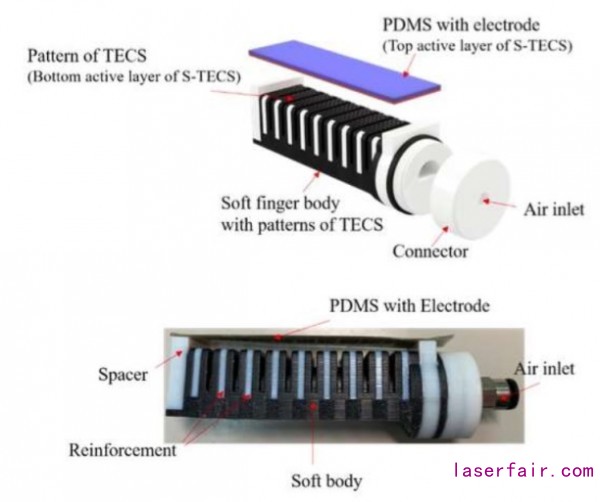
所以,研究小組選擇使用摩擦電傳感器。這種類型的組件提供了很高的可拉伸性和靈敏度,從而使機械手可以實時主動感知和感知其變形或響應。在該過程中3D打印起到了很大的作用,它不僅能夠使用多種材料,并利用縮短了原型制作時間的一步式打印過程。而研究人員的S-TECS傳感器是通過將摩擦電曲率傳感器和可伸縮電極相結合而構造的,避免了與先前項目相同的集成復雜性。
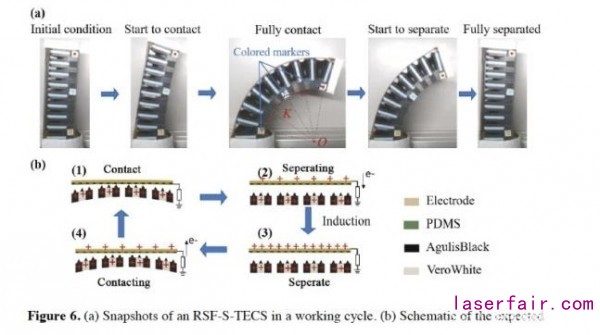
這款柔軟機器人手指的主體由與主氣道相連的九個充氣腔組成,每個充氣腔均呈矩形,以提供用于印刷S-TECS圖案的平坦表面。硬增強腔室的寬度為2 mm,兩端具有兩個墊片,以支撐S-TECS的頂層,并在兩層之間保持3 mm的高度。附加手指只能根據其腔室配置在一個方向上彎曲。當手指彎曲時,S-TECS的頂層開始接近底層,直到完全接觸,激活觸點帶電并發電。

研究人員使用Stratasys多材料Objet350 3D打印機將這款柔軟的機器人手指分兩個部分:增強的軟主體和連接器,然后逐個生產。S-TECS的圖案直接印刷在手指主體的頂面上,以簡化整個制造過程,并減少生產時間。使用摩擦狀的AgilusBlack印刷材料生產該裝置的摩擦電層和柔軟體,因為它的拉伸強度為2.75 MPa,斷裂伸長率為250%。固化在室溫下進行24小時,然后將手指的3D打印部件擰在一起,并通過硅酮粘合劑粘貼S-TECS,組裝完成。
通過改變表面結構,施加在其上的力以及自動設置的工作頻率來測試傳感器在不同件下的性能。未發現將傳感器與不同的軟材料集成在一起會降低整個機器人系統的靈活性和適應性。
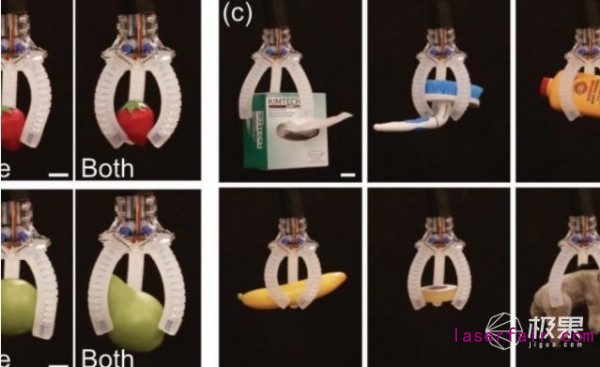
該項測試不僅證明了S-TECS作為自供電曲率傳感器的有效性,而且證明了使用多材料3-D打印技術創建具有摩擦電層的柔軟機器人結構的可行性。因此研究人員得出結論,該方法有可能在未來使用先進傳感功能的機器人應用中使用。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀

































 關注我們
關注我們

